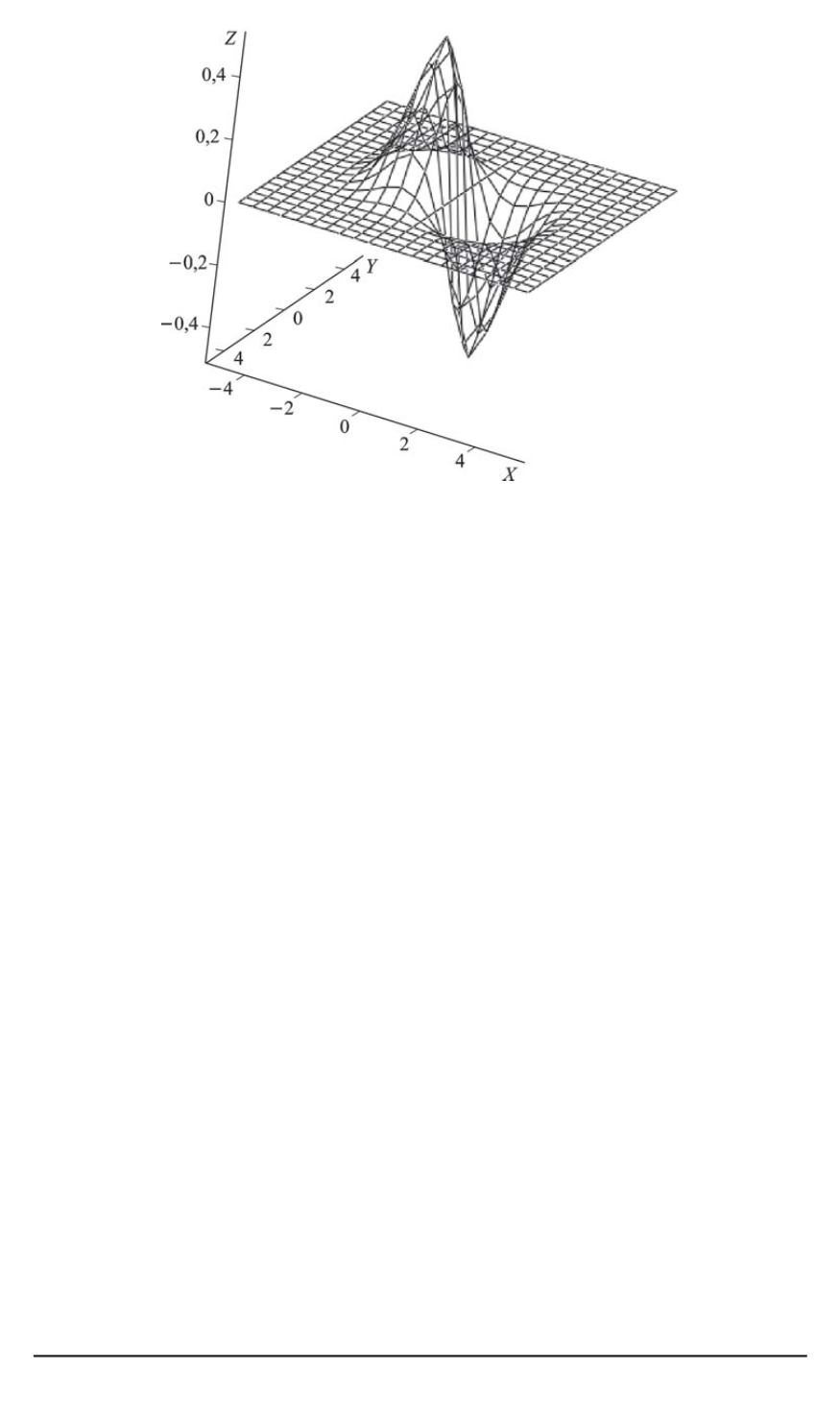
Рис. 3. График функции
A
(
x
,
y
)
где
Rot
θ
=
cos
θ
−
sin
θ
sin
θ
cos
θ
— оператор вращения на угол
θ
=
φ
(
x, y
)+
+
π/
2
.
Алгоритм
Для
∀
x
∈
[3
σ
x
+ 3
σ
y
, x
max
−
(3
σ
x
+ 3
σ
y
))
Для
∀
y
∈
[3
σ
x
+ 3
σ
y
, y
max
−
(3
σ
x
+ 3
σ
y
))
Если
b
(
x, y
)
>
0
θ
= Φ(
x, y
) +
π/
2
Для
∀
x
1
∈
[
−
3
σ
x
,
3
σ
x
]
Для
∀
y
1
∈
[
−
3
σ
y
,
3
σ
y
]
x
0
y
0
= Rot
θ
x
1
y
1
+
x
y
h
(
θ, x
0
, y
0
) =
h
(
θ, x
0
, y
0
) +
A
(
x
1
, y
1
)
b
(
x, y
)
dxdy
Для исследования разработанных алгоритмов на изображение на-
носится аддитивный гауссов шум
g
(
σ
)
, причем значения параметра
распределения
σ
изменяются от 0 до 1000. Тестовое изображение пред-
ставлено на рис. 4,
а
.
Для выделения угловых точек будем использовать ГИП по сегмен-
ту. Подберем наиболее оптимальные значения параметров сегмента.
Считаем, что после выделения областей вокруг угловых точек рас-
сматриваются область, размером 12
×
12 и значения параметрической
функции, которые больше порога 100. Визуально анализируем полу-
ченные результаты и отмечаем ошибки, такие как несовпадения точек,
выделение лишних точек и удаление угловых точек. В табл. 2 приве-
денырезультатыисследований для исходного тестового изображения
(см. рис. 4,
а
).
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2009. № 1 93


