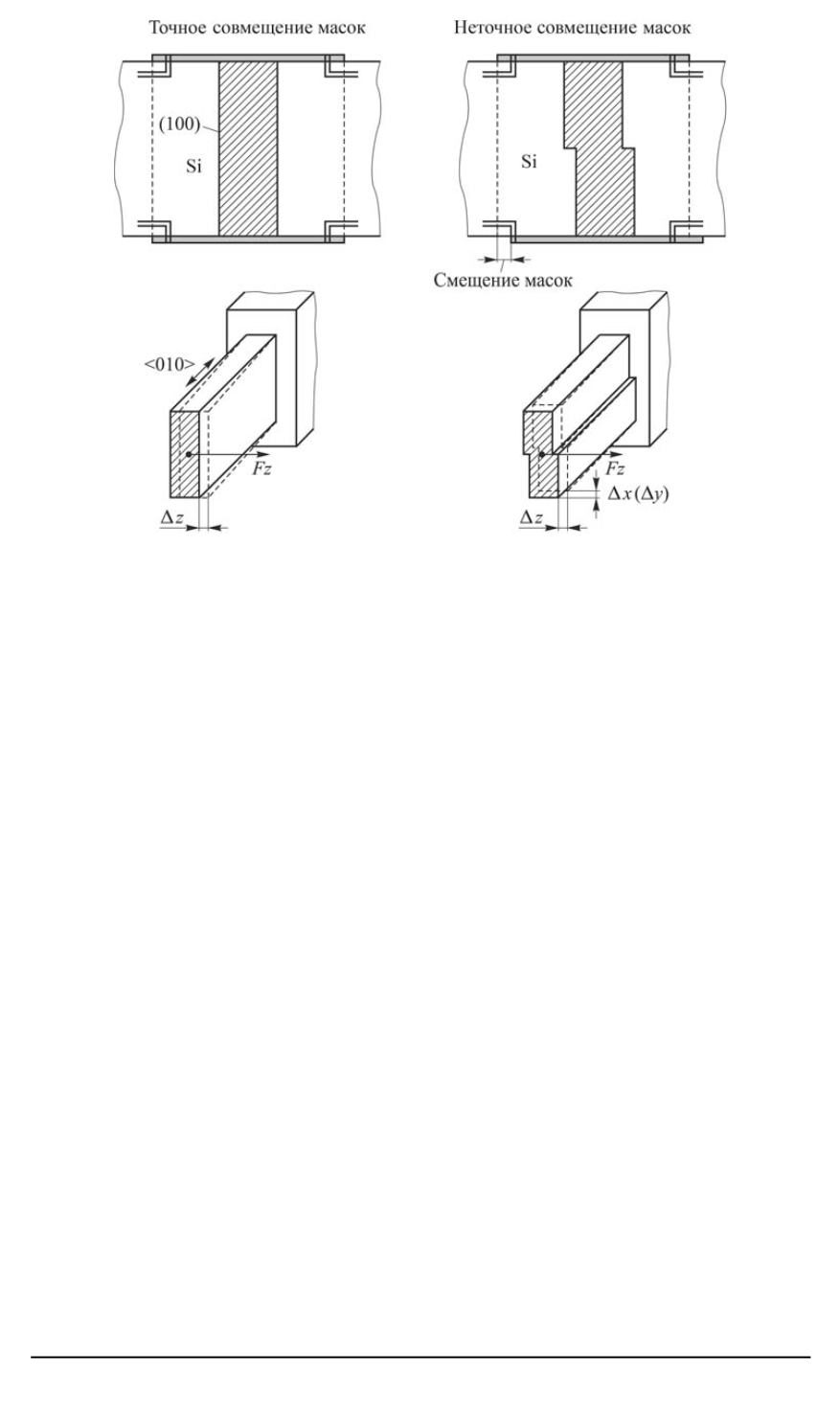
Рис. 2. Погрешности формы поперечного сечения упругих перемычек
устранить колебаниянепосредственно в самом электромеханическом
узле гироскопа в процессе регулировки на этапе сборки [4–9].
В работе [1] рассмотрен гироскоп с магнитоэлектрическими датчи-
ками момента и описана возможность компенсации нулевого сигнала
с помощью регулировки направлениявозбуждающей магнитоэлектри-
ческой силы
F
z
, а также показано, что если в магнитной системе маг-
нитоэлектрического датчика момента возбужденияколебаний (рис. 3)
вместо нижних магнитов использовать магнитопроводы с профили-
рованными торцами (регулировочные головки), то в зазорах наряду
с основным аксиальным полем
В
1
, вызывающим возникновение тан-
генциальной составляющей силы
F
1
, будет образовыватьсярадиаль-
ное магнитное поле
В
2
, способствующее появлению аксиальной со-
ставляющей силы
F
2
, способной компенсировать вредные колебания
маятника от искажения упругих балок подвеса. При этом значение и
направление силы
F
2
регулируютсяпутем разворота регулировочных
головок, как показано на рис. 4.
Оценим эффективность предложенного метода компенсации ну-
левого сигнала гироскопа. Дляэтого смоделируем магнитное поле в
системе возбуждениягироскопа. Моделирование выполнено в среде
ANSYS.
На рис. 5 показана использованнаяпри моделировании схема рас-
чета магнитного поляв случае выполнениярегулировочных головок
без профилирования. На рис. 6 (кривые
1
) и
7
(кривые
1
) приведе-
ны распределенияпо диаметру магнитного зазора аксиальной (
В
1
) и
124 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 4


