U
(
x , y
) = exp
i ϕ
I
−
f
1
x
f
2
,
−
f
1
y
f
2
+
ϕ
1
−
f
1
x
f
2
,
−
f
1
y
f
2
⊗
⊗ {
exp [
iϕ
2
(
ν
x
, ν
y
)]
}
,
где
f
1
, f
2
— фокусные расстояния ФПО
3
и
5
соответственно.
Стего объект
S
(
x , y
)
определяется согласно выражению (1), а
именно
S
(
x , y
) =
C
(
x , y
) +
|
U
(
x , y
)
|
2
.
Процесс восстановления заключается в обратном преобразовании
и выделении действительной части полученного сигнала:
I
R
(
x, y
) =
=
Re
−
1
−
1
{
W
(
x , y
)
}
exp [
−
iϕ
2
(
ν
x
, ν
y
)] exp [
−
iϕ
1
(
x, y
)]
.
Входная функция
W
(
x , y
)
, используемая при обратном преобра-
зовании, имеет вид
W
(
x , y
) = Δ
S
(
x , y
) exp [
iϕ
r
(
x , y
)]
,
где
Δ
S
(
x , y
)
— шумоподобная составляющая, полученная из стего
объекта путем медианной фильтрации с вычитанием;
ϕ
r
(
x , y
)
— фа-
за опорного сигнала
U
r
(
x , y
)
, который определяется при отсутствии
информации, т.е.
ϕ
r
(
x , y
) = arg
{
U
r
(
x , y
)
}
,
где
U
r
(
x , y
) = exp
iϕ
1
−
f
1
x
f
2
,
−
f
1
y
f
2
⊗ {
exp [
iϕ
2
(
ν
x
, ν
y
)]
}
.
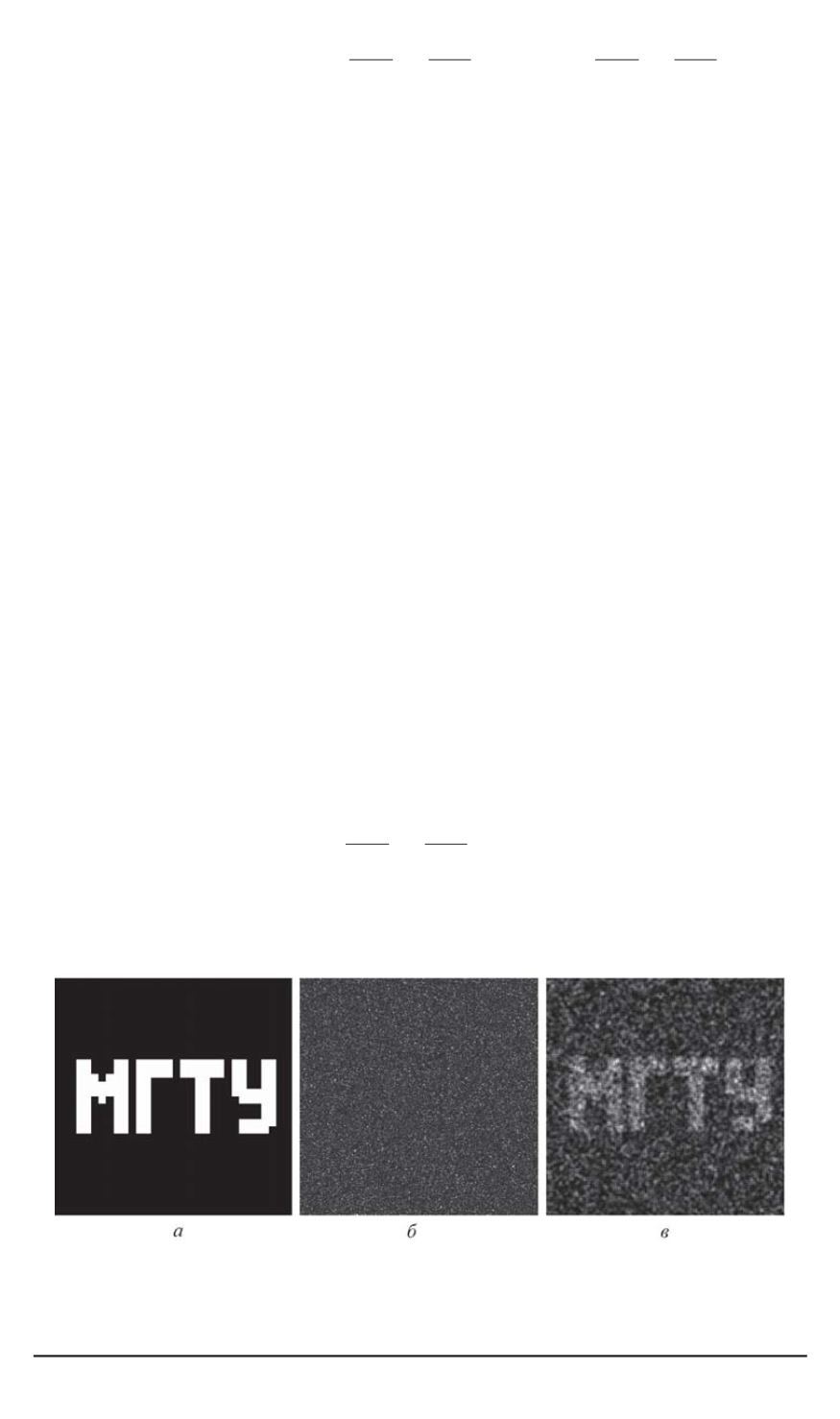
Результаты моделирования с использованием описанного метода
представлены на рис. 7.
Рис. 7. Результаты моделирования по схеме 4-
f
коррелятора:
а
— бинарный фазовый транспарант, задающий сообщение;
б
— стеганограмма;
в
—
восстановленное сообщение
38 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2010. № 1


