















 6 / 12
6 / 12

Оценка адекватности математических моделей акустических передаточных функций…
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2016. № 5
19
системы методами онлайн- и офлайн-моделирования. При офлайн-
моделировании (рис. 4,
в
) моделирование происходит в процессе настройки
адаптивного фильтра при случайном входном сигнале.
Недостаток такой АСАГ — необходимость проведения экспериментов для
идентификации системы, требуемой для данного помещения, и определения
расположения пары источник–приемник. Система, полученная методом он-
лайн-моделирования (рис. 4,
г
), лишена этого недостатка, поскольку при нали-
чии в системе второго контура настройки идентификация происходит во время
работы системы [10]. Однако алгоритм работы системы значительно усложня-
ется, что приводит к трудностям при моделировании и практической реализа-
ции системы. Тем не менее использование таких алгоритмов повышает каче-
ственные показатели системы, прежде всего, за счет снижения требований к
адаптивному фильтру и повышения скорости сходимости алгоритма.
При реализации АСАГ с МОУ наиболее перспективным подходом является
построение модели на основе минимальной априорной информации об объекте
управления, например, геометрии помещения, материале покрытий и располо-
жении крупных предметов.
Обобщенный алгоритм идентификации передаточной функции.
Для
проведения идентификации в частотной области передаточной функции может
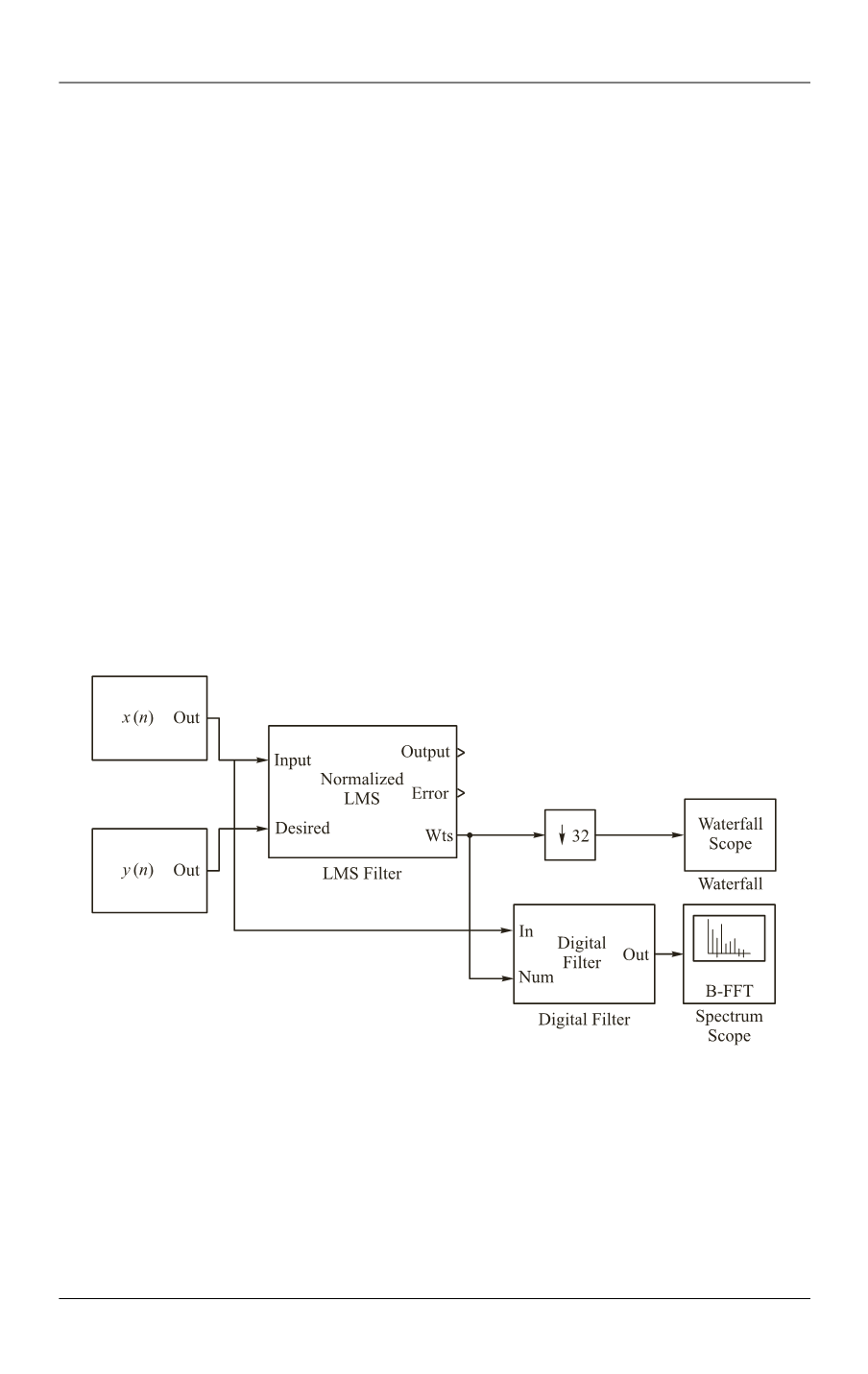
быть использована следующая модель, созданная в среде MATLAB (рис. 5) [10].
Рис. 5.
Модель для идентификации передаточной функции с использованием алгоритма
наименьших средних квадратов (НСК, LMS), созданная в среде MATLAB:
x
(
n
)
—
входное воздействие (шум);
y
(
n
) — отклик объекта управления (помещения)
В рассматриваемом случае после настройки адаптивного алгоритма
найденные коэффициенты передаются в цифровой фильтр. Порядок фильтра
определяется уровнем сигнала ошибки. Модель реализована в виде фильтра с
конечной импульсной характеристикой (КИХ-фильтра) 256 порядка с тактовой