















 5 / 12
5 / 12

С.Г. Семенцов, Л.Р. Байкина, Т.В. Половинкина
18
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2016. № 5
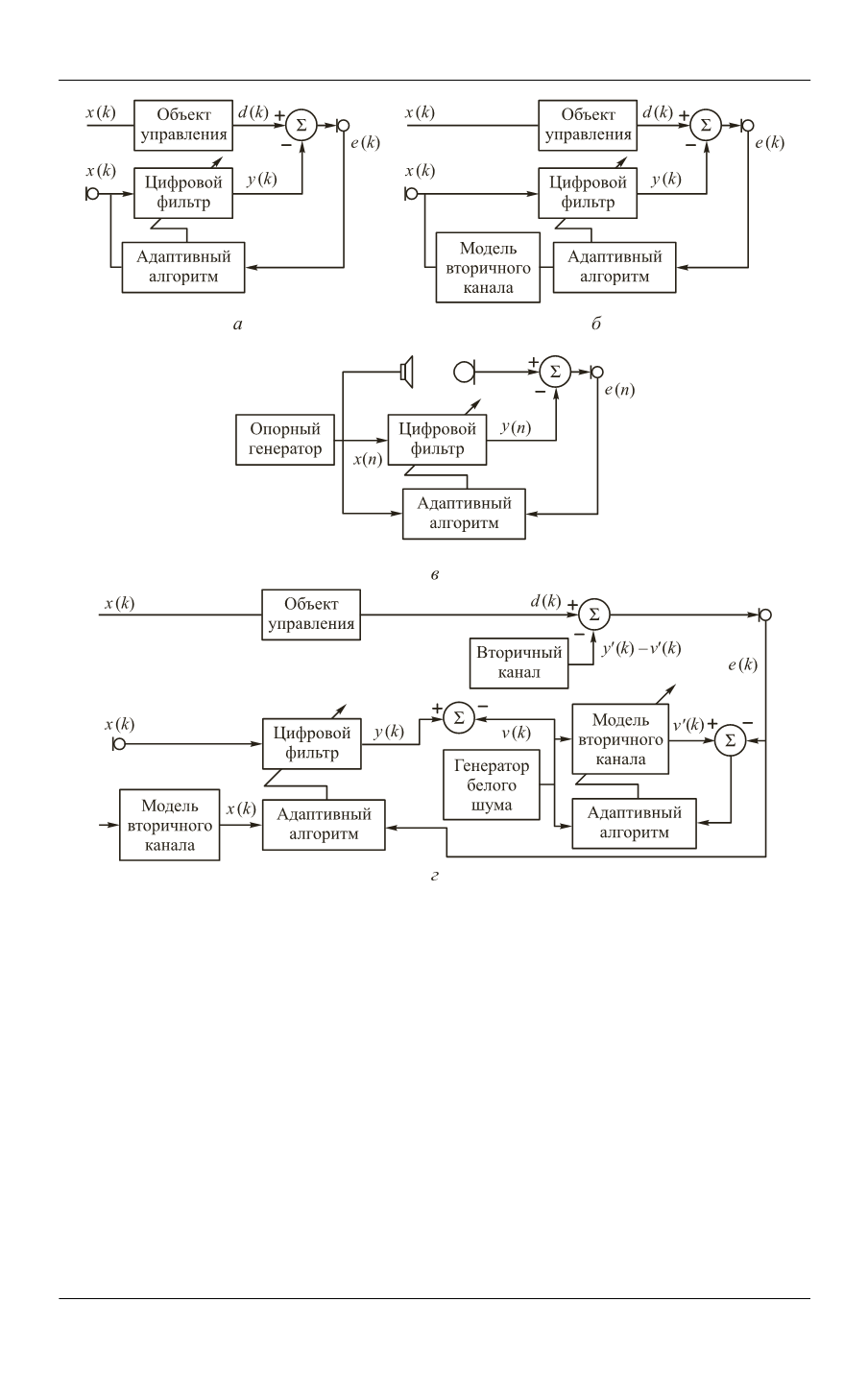
Рис. 4.
Типовые управляющие схемы АСАГ без МОУ (
а
), с использованием модели
акустической передаточной функции (
б
), полученные методом офлайн-моделирова-
ния (
в
) и онлайн-моделирования (
г
):
x
(
n
)
—
входное воздействие (шум);
y
(
n
) — выход адаптивного фильтра;
e
(
n
) — сигнал ошибки
гашения;
v
(
k
)
—
идентифицирующий сигнал;
v
(
k
)
—
отклик синтезированной модели объекта
управления
Частично эту проблему решают за счет применения модификаций адаптив-
ных алгоритмов с помощью моделей передаточной функции (Secondary Path
Transfer Function). Чаще всего в АСАГ применяют так называемый FX-LMS
(filtered-X LMS) алгоритм (рис. 4,
б
) [9].
В указанном алгоритме модель вторичного канала представляет собой инте-
гральную передаточную характеристику объекта управления, цифро-
аналоговых и аналого-цифровых преобразователей, усилителей и излучателей.
Модель вторичного канала может быть получена в процессе идентификации