














 10 / 14
10 / 14

Е.И. Старовойтов, Н.Е. Зубов
124
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2016. № 4
равной 2,72 кг, и потребляемой от бортовой сети
мощности 8,13 Вт, которые не превышают ранее
установленных ограничений.
Заключение.
Выполнен анализ факторов,
влияющих на погрешности при измерении
дальности и скорости бортовой ЛЛС по диф-
фузно отраженному сигналу от корпуса пас-
сивного космического объекта в диапазоне
дальностей 0,5…5,0 км.
Рассмотрены два варианта построения при-
емного тракта ЛЛС — с ФПУ на основе ЛФД и с
ФПУ на основе
pin
-ФД.
Получены зависимости от дальности сум-
марной погрешности измерений для фотодетек-
торов двух типов. Из результатов следует, что при использовании ФПУ на осно-
ве ЛФД погрешность измерений ЛЛС определяется в основном дискретизацией
ИВИ и слабо зависит от дальности, а при использовании ФПУ на основе
pin
-ФД
погрешность измерений резко возрастает с увеличением дальности. Поэтому
при использовании ФПУ на основе
pin
-ФД целесообразно провести оптимиза-
цию приемного тракта.
Приведены результаты оптимизации приемного тракта бортовой ЛЛС с
ФПУ на основе
pin
-ФД с использованием метода поиска множеств Парето и
обобщенной функции эффективности.
Получено множество Парето в виде кривой для погрешности однократного
измерения дальности и суммарной массы ЛЛС. Максимально допустимой массе
ЛЛС, равной 3,9 кг, соответствует погрешность однократного измерения даль-
ности 1,25 м.
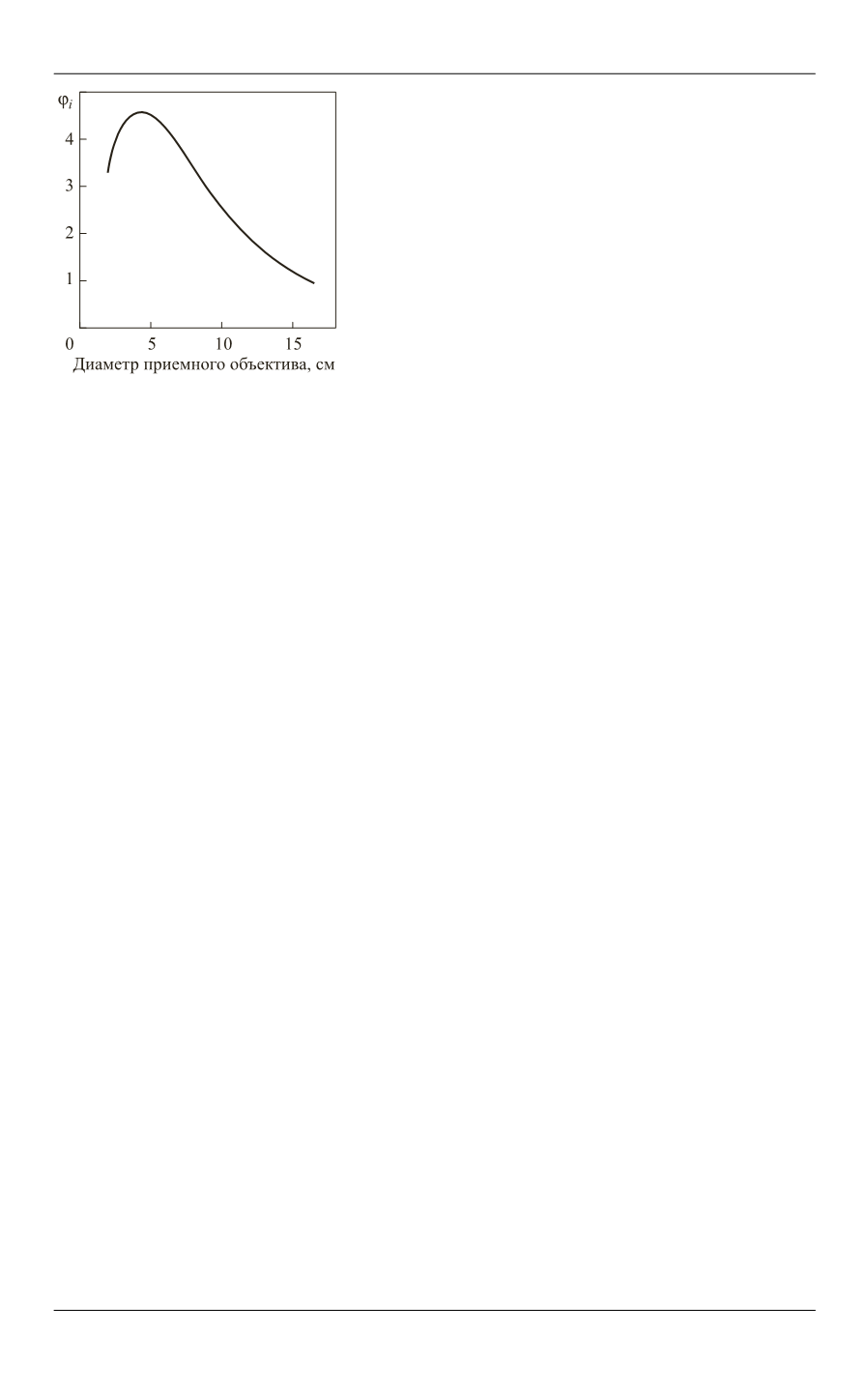
Для оптимизации массогабаритных характеристик ЛЛС и потребляемой ею
от бортовой сети мощности использована обобщенная функция. Приведена за-
висимость обобщенной функции от диаметра приемного объектива с выражен-
ным максимумом, которому соответствуют масса ЛЛС 2,72 кг и потребляемая
от бортовой сети мощность 8,13 Вт, которые не превышают ограничений для
бортовой аппаратуры.
В дальнейших работах будет проведен детальный анализ влияния характе-
ристик объекта на погрешность измерений ЛЛС дальности и скорости, а также
использования других типов фотодетекторов.
ЛИТЕРАТУРА
1.
Медведев С.Б., Сазонов В.В., Сайгираев Х.У.
Моделирование зон неустойчивой рабо-
ты радиотехнической измерительной системы с активным ответом во время сближения
и стыковки космических кораблей с Международной космической станцией // Матема-
тическое моделирование. 2012. Т. 24. № 2. С. 151–160.
Рис. 4.
Зависимость обобщенной
функции φ
i
от диаметра прием-
ного объектива ЛЛС