















 4 / 15
4 / 15

the
N
f
-bit length generated by the switching system on an telemetry object
with a predetermined synchronization code of the
n
-bit length.
This article presents the algorithm for frame synchronization and the
equations describing the operating states of the synchronizer [1, 2], with
regard to the problem of frame synchronization in a stream of TMI.
The performance of the frame synchronization system in the “Search”
and “Test” states is determined by the probability of correct detection
of both the synchronization code and the average time required for the
procedure. In the “Capture” state the performance is determined by the
average time of false synchronization detection after the transition to the
“Capture” mode.
The selection of low thresholds for the state transitions increases the
likelihood of correct detection of the synchronization code. However, this
increases the synchronization recovery time. Methods of synchronization
parameter selection are based on the analysis of correlation of these two
indicators.
TMI synchronization systems are described in such works as [1–4].
They are based on transmission of the telemetry stream as random data
over the communication channel with noise, model of which allows for
only the occasional inversions. This paper describes the experiments carried
out by transmitting the telemetry stream containing the real telemetry
data, generated in the IRIG-106 standard [8], over the communication
channel with noise, the model of which allows for not only the occasional
inversions, but also for the occasional missing bits [9]. This kind of errors
significantly affects the quality of the frame synchronization in the TMI
stream. Usefulness of the IRIG-106 standard is proved by its wide use in
the aerospace industry.
Due to the fact that the actual telemetry data used in the experiments
can affect the quality of solving the proper detection problem of the
synchronization code in the stream, the experimental results may
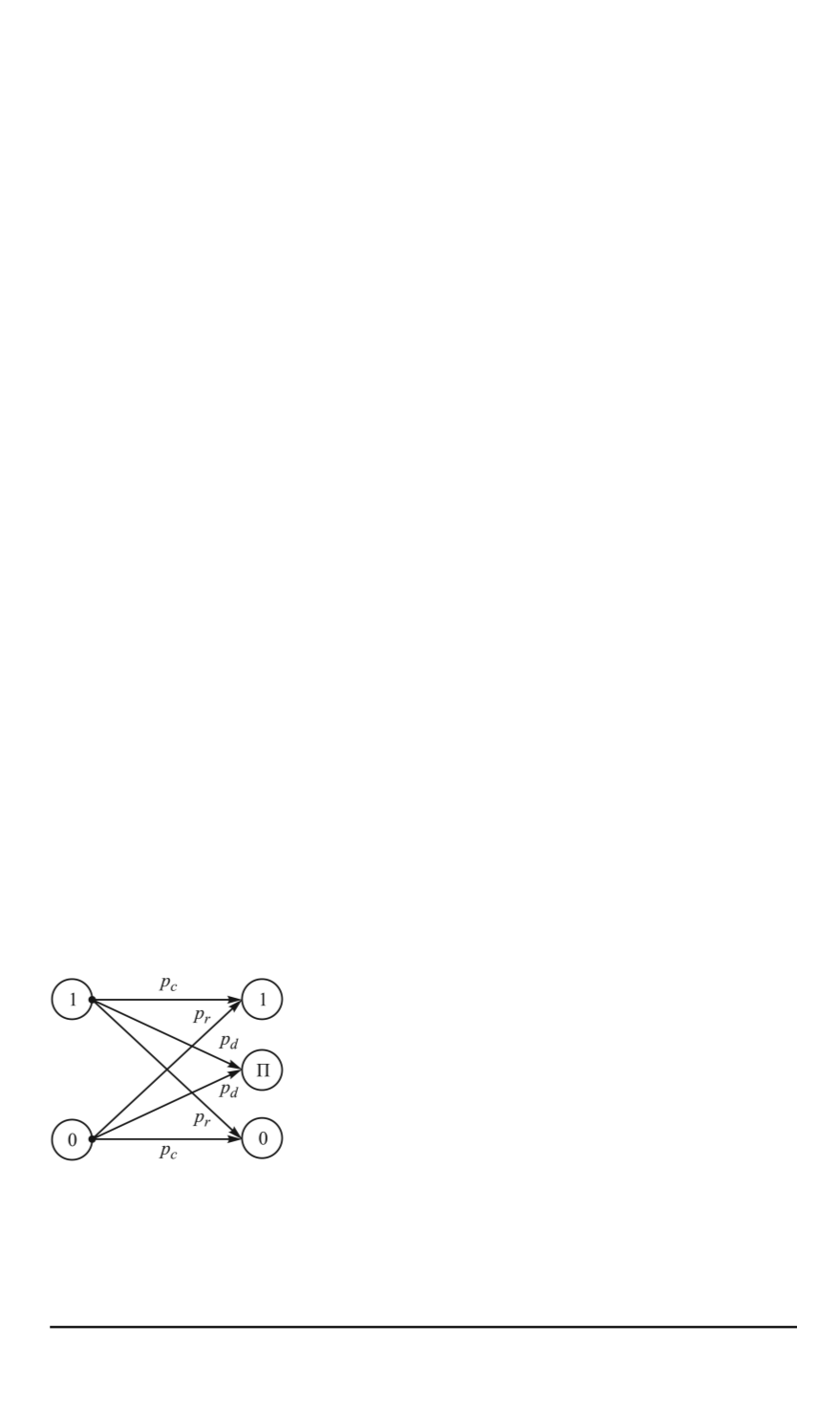
Рис. 4.
Model
of
symmetrical
binary
channel with missing bits
(
p
c
+
p
r
+
p
d
= 1
)
differ from those obtained theoretically, but it
is shown that the best results are obtained
in the experiments with the same selection
of synchronizer parameters as for the best
theoretical results.
Fig. 4 shows a model of the communication
channel, allowing for random inversion and
missing bits:
p
c
— is the probability of correct bit
transmission (0 or 1),
p
r
— is the probability of
bit inversion during transmission (
0
→
1
,
1
→
0
),
p
d
— is the possibility of missing the current bit
(loss of bit 0 or 1).
120 ISSN 0236-3933. HERALD of the BMSTU. Series Instrument Engineering. 2015. No. 2