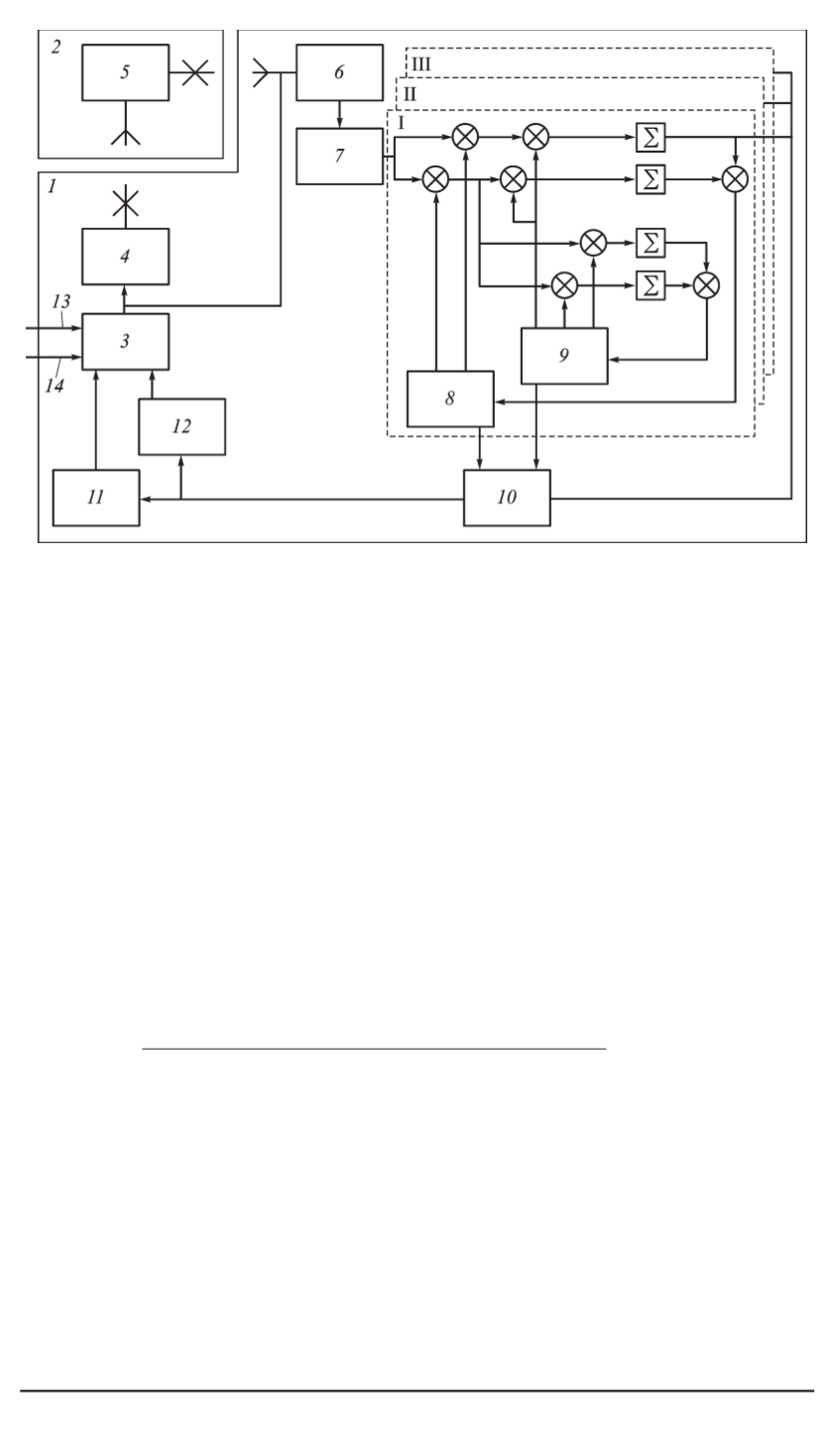
Рис. 3. Структурнаясхема системы синтеза навигационного радиосигнала:
1
— ЗС;
2
— НКА;
3
— формирователь навигационного сигнала;
4
— усилитель мощ-
ности;
5
— БРТР;
6
— высокочастотная часть приемного устройства;
7
— аналого-
цифровойпреобразователь;
8
— управляемыйгенератор ФАПЧ;
9
– управляемый
генератор ССЗ;
10
— навигационныйпроцессор;
11
— управляемыйгенератор не-
сущих колебаний;
12
— управляемыйгенератор огибающих колебаний;
13
— ЭВИ;
14
— сигнал точного времени; I, II, III — каналы цифровойобработки
Полученные в результате обработки оценки времени распростра-
нения и задержки радиосигналов в ионосфере используются для упра-
вления генераторами несущих и огибающих колебанийЗС.
Метод оценки времени распространенияи ионосферной за-
держки.
Для оценки времени распространения радиосигнала
τ
ГСНО
от ЗС до НКА будем использовать следующую модель первичного
измерения запроснойдальности:
S
ГСНО
= 2(
R
+
δ
ион
+
δ
троп
) +
δ
КА
+
δ
ПРМ
+
e
S
,
(1)
где
R
= (
x
НКА
−
x
)
2
+ (
y
НКА
−
y
)
2
+ (
z
НКА
−
z
)
2
— геометрическая
дальность между НКА с координатами
x
НКА
,
y
НКА
,
z
НКА
и потребите-
лем с координатами
x
,
y
,
z
;
δ
ион
— задержка распространения сигнала
НКА в ионосфере;
δ
троп
— задержка распространения сигнала НКА в
тропосфере;
δ
КА
— аппаратурная задержка БРТК;
δ
ПРМ
— аппаратур-
ная задержка радиосигнала в приемнике;
e
S
— шумовые погрешности
измеренийпсевдодальности.
Поскольку связь между ЗС и НКА осуществляется в пределах пря-
мойвидимости, а среда распространения является изотропной, то ис-
пользование БРТК без обработки на борту НКА позволяет измерить
8 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2012. № 1


