














 7 / 13
7 / 13

Траектория РМ № 3.
Траектория реализована методом снижения
вероятности перехвата (МСВП). В ходе предполетной подготовки по
имеющейся математической модели РМ, начальным условиям, коор-
динатам цели, зонам поражения ЗРК и маневренным свойствам РМ
определяется и рассчитывается траектория полета РМ. В память бор-
тового вычислительного устройства РМ вводят реперные точки, в том
числе координаты точки начала управления (точка
B
5
), точки пикиро-
вания (точка
С
5
) и координаты точки цели (точка
r
1
), через которые
проходит опорная траектория РМ.
В качестве метода наведения при полете от одной реперной точки
к другой авторами выбран МПН. Подробно этот модифицированный
метод наведения описан в работе [9]. За точки наведения приняты
координаты реперных точек, тем самым движения РМ осуществляется
по траектории с минимальной длиной в зоне поражения ЗРК.
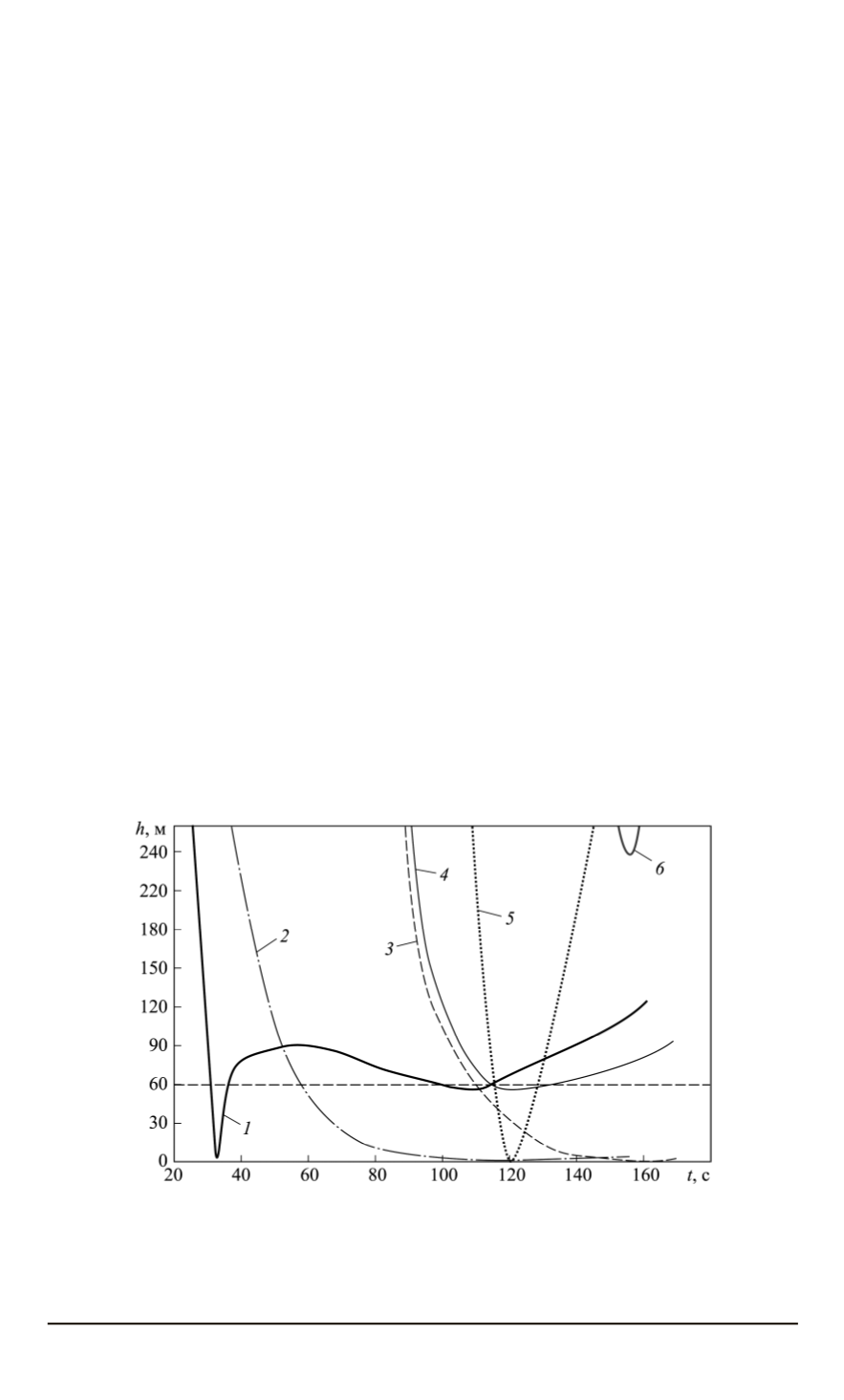
Результаты моделирования.
Здесь и далее под промахом
h
бу-
дем понимать абсолютную величину минимального расстояния между
центрами масс ЗУР и РМ. Зависимость промаха ЗУР от времени
h
(
t
)
приведена на рис. 4. Пуски РМ № 1–3 осуществляются из точки
О
5
.
Время на рисунке отсчитывается от начала пусков ЗУР (момента на-
хождения РМ в точке
B
5
). Штриховой линией на рис. 4 обозначен
промах ЗУР равный 60 м. Согласно эскизному проекту [6], указанное
значение является пороговым для срабатывания импульсного радио-
взрывателя, расположенного на борту ЗУР. В представленной модели
перехвата условно принимается, что при расстоянии между ЗУР и РМ,
меньшем указанного значения, РМ будет поражена, не зависимо от их
взаимного углового положения.
Рис. 4. Зависимость промаха ЗУР от времени ее пуска для траекторий РМ,
полученных МПН для ЗРК
r
2
(
1
), МПН для ЗРК
r
1
(
2
), при маневре “змейка”
для ЗРК
r
1
(
3
), при маневре “змейка” для ЗРК
r
2
(
4
), МСВП для ЗРК
r
2
(
5
),
МСВП для ЗРК
r
1
(
6
)
40 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2015. № 1