














 5 / 13
5 / 13

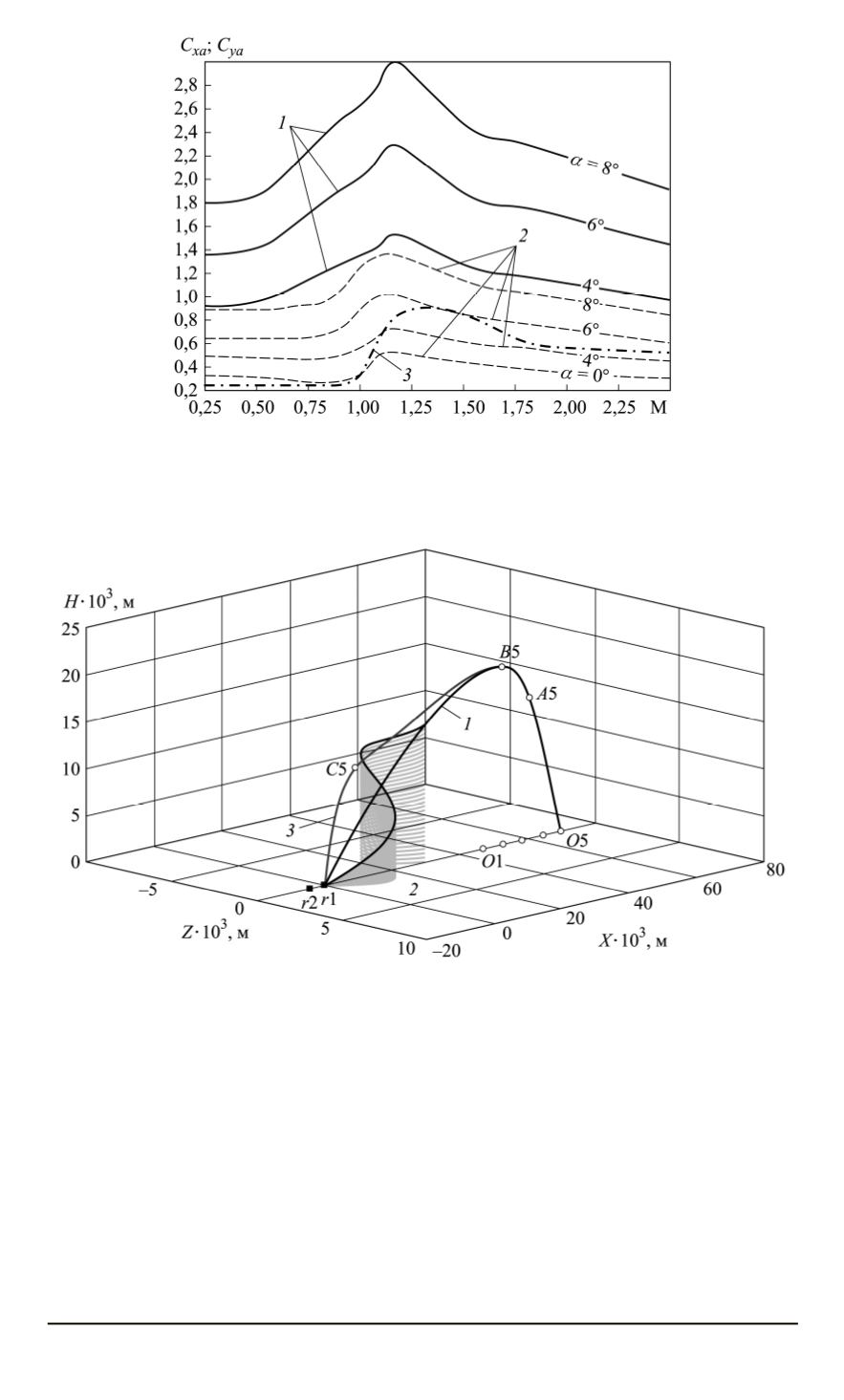
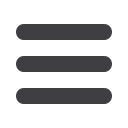
Рис. 2. Зависимости аэродинамических коэффициентов подъемной силы мар-
шевой ступени (
1
), лобового сопротивления маршевой ступени (
2
) и лобового
сопротивления ускорителя (
3
) ракеты В-601П на активном участке полета от
числа Маха
Рис. 3. Траектории полета РМ, полученные методом пропорционального наве-
дения (
1
), при маневре “змейка” (
2
) и методом снижения вероятности перехва-
та (
3
)
пусковой установки ЗРК). Все РМ двигаются прямолинейно на всем
участке активного полета. По окончании работы маршевого двигателя
второй ступени (на пассивном участке полета) все РМ обнаружива-
ются радиолокационными станциями ЗРК (в точках
A
1
–
А
5
). Ракеты-
мишени выполняют программный разворот в вертикальной плоско-
сти до значения угла места 0
◦
(точка
В
5
). С этого момента ЗРК
r
1
и
r
2
осуществляют ежесекундные пуски ЗУР по движущимся РМ.
Ракеты-мишени реализуют индивидуальные программные траектории
38 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2015. № 1