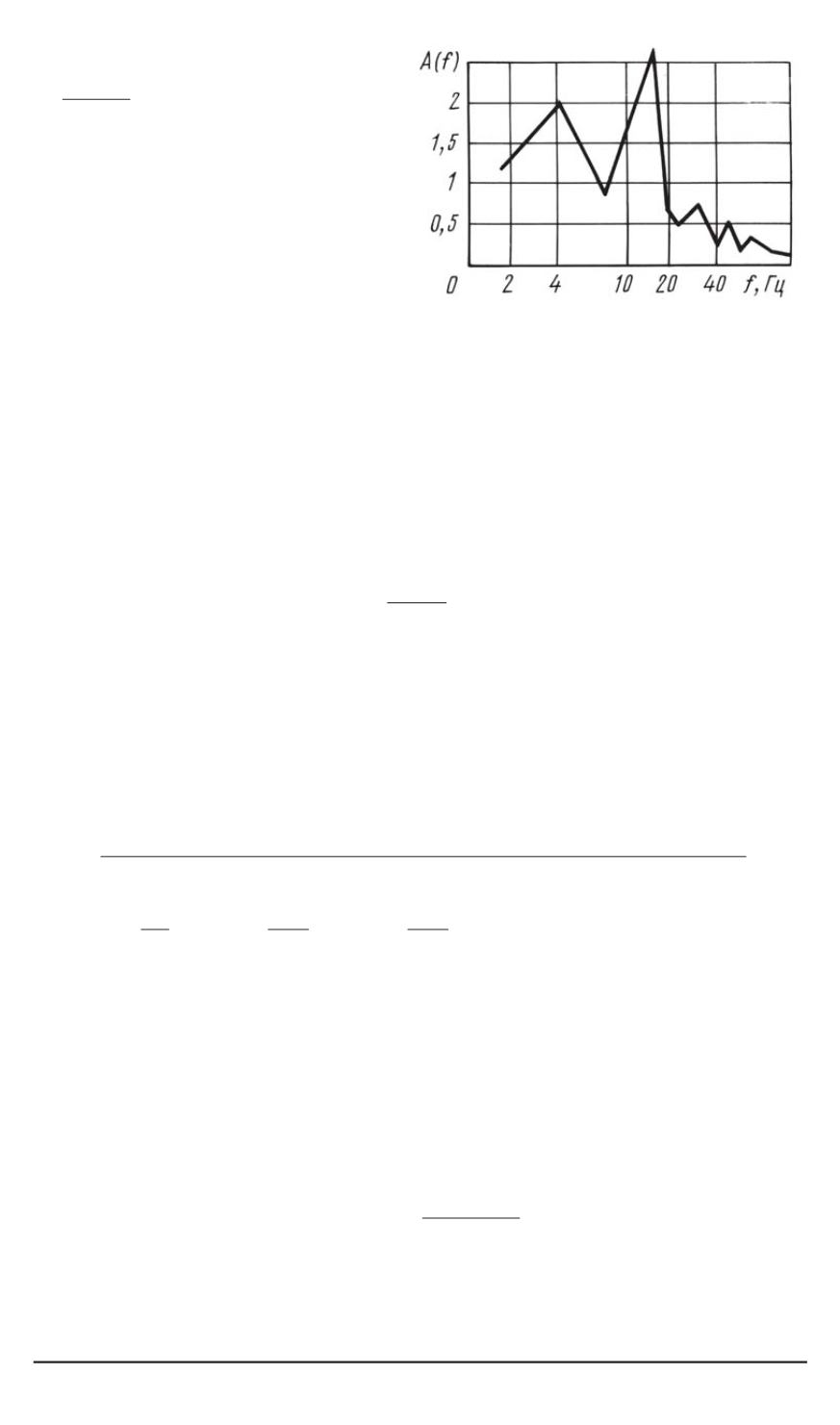
Рис. 4. Амплитудная частотная характе-
ристикачеловека-оператора
На этом рисунке
A
(
f
) =
=
a
z
1
(
f
)
a
z
0
(
f
)
,
где
f
— частота в гер-
цах.
Далее для оценки влияния
вибрации на эффективность ра-
ботычеловека-оператора ис-
пользуем экспериментальные
данные, приведенные в рабо-
те [1]. Предположим также,
что вибрация головычеловека-
оператора приводит к ошибкам
восприятия информации по информационному каналу и непосред-
ственно влияет на регулируемую величину
y
(
t
)
.
При получении оценки влияния вибрации представим спектраль-
ную плотность (см. рис. 2) приближенно в виде равномерной спек-
тральной плотности с уровнем
с
2
z
= 0
,
3
м
2
с
3
рад
=
S
z
(
ω
)
(2)
в полосе частот от 0 до
10
·
2
π
рад/c, исходя из равенства дисперсий
реального случайного и аппроксимированного процессов.
Частотную характеристику (см. рис. 4) также приближенно можно
описать с помощью передаточной функции:
W
в
ч.о
(
s
) =
=
K
4
K
5
K
6
(
T
2
4
s
2
+ 2
ξ
4
T
4
s
+ 1)(
T
2
5
s
2
+ 2
ξ
5
T
5
s
+ 1)(
T
2
6
s
2
+ 2
ξ
6
T
6
s
+ 1)
,
(3)
где
T
1
=
1
8
π
c;
T
2
=
1
32
π
c;
T
3
=
1
64
π
c;
ξ
1
= 0
,
4
;
ξ
2
= 0
,
25
;
ξ
3
= 0
,
5
;
K
1
= 2
,
0
;
K
2
= 2
,
7
;
K
3
= 0
,
7
.
Это описание динамических свойств человека-оператора по отно-
шению к вибрации выполнено приближенно с помощью трех колеба-
тельных звеньев с резонансными частотами 4, 16 и 32 рад/с на основе
экспериментальных данных, приведенных в работе [1].
Считаем, что входной сигнал
x
(
t
)
по информационному каналу
является случайной функцией времени со спектральной плотностью:
S
x
(
ω
) =
c
2
x
K
3
T
3
jω
+ 1
2
.
(4)
В соответствии с рис. 1 передаточная функция по ошибке системы
будет
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 2 33


