5 Гц, уровень которой возрастает, происходит не только увеличение
дисперсии ошибки слежения, но и меняется вид плотности вероят-
ности этой ошибки, так как плотность становится бимодальной. Все
это свидетельствует о необходимости оценки влияния вибрационных
воздействий на человека-оператора при управлении им объектами по
информационным каналам.
При малых колебаниях и достаточно малых частотах возбуждения
(до 100 Гц) тело человека можно рассматривать как вязкоупругую ме-
ханическую систему [1]. Тогда динамические свойства тела человека-
оператора можно описать с помощью частотных характеристик:
— передаточной функции
G
(
jω
)
как отношения преобразования
Фурье вынужденных колебаний точки наблюдения на теле к преобра-
зованию Фурье сигнала источника возбуждения вибрации;
— входного механического импеданса
Z
(
jω
)
для описания связи
между силой, передаваемой телу, и виброскоростью точки приложе-
ния силы, т.е. отношения преобразования Фурье виброскорости точки
приложения силык преобразованию Фурье процесса изменения силы.
Строго говоря, динамические свойства человека-оператора следует
описывать так, как это показано в работе [2], только тестовый сигнал
должен имитировать вибрационное воздействие.
Однако в настоящей работе мывоспользуемся материалами из ра-
боты[1] и покажем на конкретном примере, каким образом можно оце-
нить влияние вибрации на эффективность работыоператора в системе
“человек-машина” при получении им сведений по информационному
каналу.
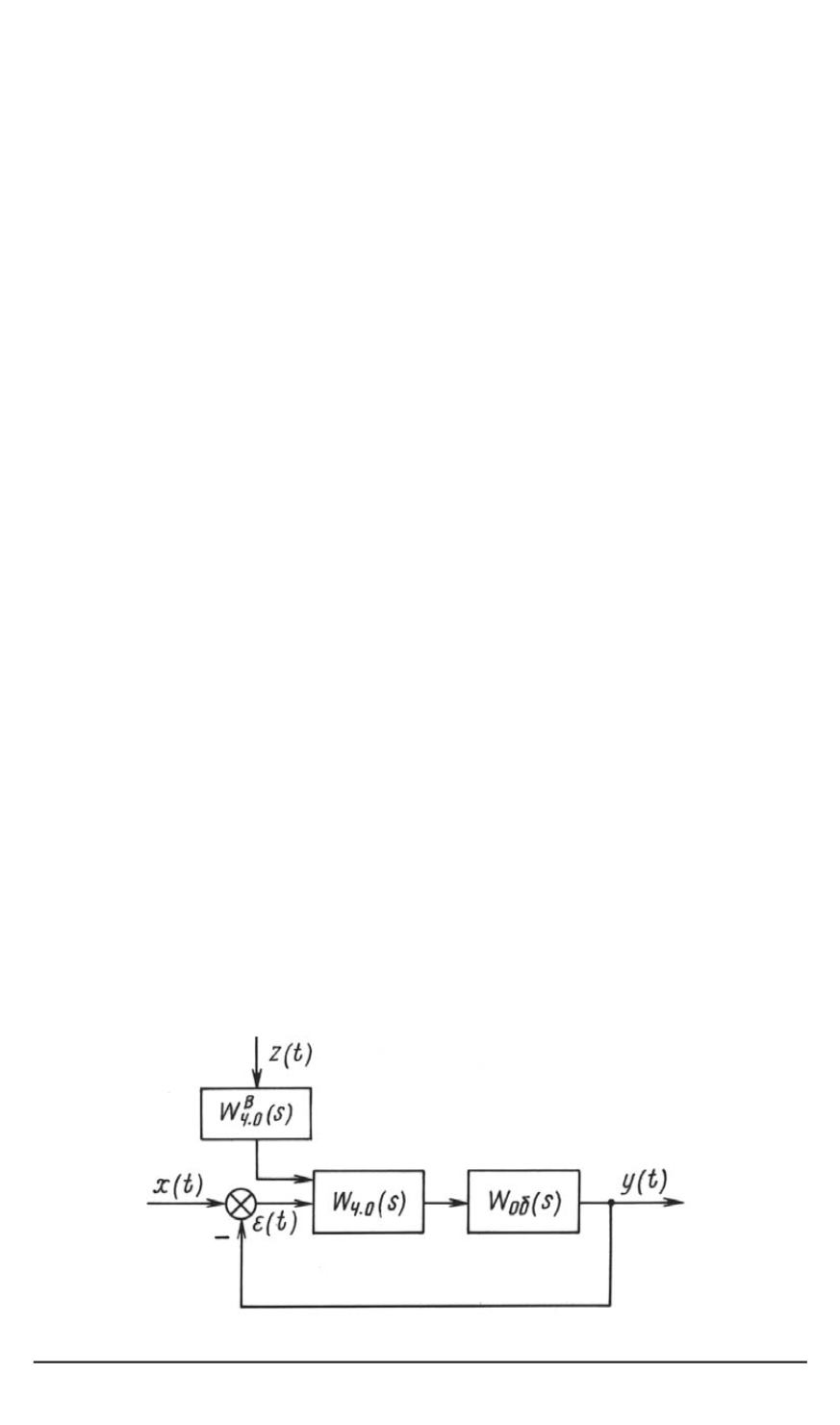
Рассмотрим систему “человек-машина”, структурная схема кото-
рой приведена на рис. 1, где обозначено
x
(
t
)
— входной сигнал по ин-
формационному каналу;
z
(
t
)
— вибрация на рабочем месте оператора;
ε
(
t
)
— ошибка системы;
y
(
t
)
— выходной сигнал;
W
ч.о.
(
s
)
— переда-
точная функция человека-оператора,
W
об
(
s
)
— передаточная функция
объекта управления.
Рис. 1. Структурная схема системы “человек–машина” с учетом вибрации
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 2 31


