Из работы[2] возьмем следующую функцию:
W
ч.о.
(
s
) =
K
n
e
−
sτ
(
T
1
s
+ 1)
T
2
2
s
2
+ 2
ξ
2
T
2
s
+ 1
,
(1)
где
s
— символ преобразования Лапласа (при переходе в частотную
область
s
=
jω
);
W
об
(
s
) =
K
ЛА
/s
— передаточная функция объекта
управления (летательного аппарата ЛА). Эта передаточная функция
приближенно отражает динамику самолета при управлении высотой;
W
в
ч.о
(
s
)
— передаточная функция человека-оператора от точки при-
ложения вибрации до точки наблюдения на теле оператора;
z
(
t
)
—
вибрационное воздействие.
Сигналы
x
(
t
)
и
z
(
t
)
являются случайными функциями времени.
На рис. 1 показано, что вибрационное воздействие
z
(
t
)
через пере-
даточную функцию
W
в
ч.о.
влияет на выходной сигнал системы
y
(
t
)
—
регулируемую величину.
Задача состоит в том, чтобыоценить дисперсию ошибки
ε
(
t
)
−
σ
2
ε
и
дисперсию составляющей выходного сигнала
y
(
t
)
−
σ
2
y
, обусловленную
воздействием вибрации.
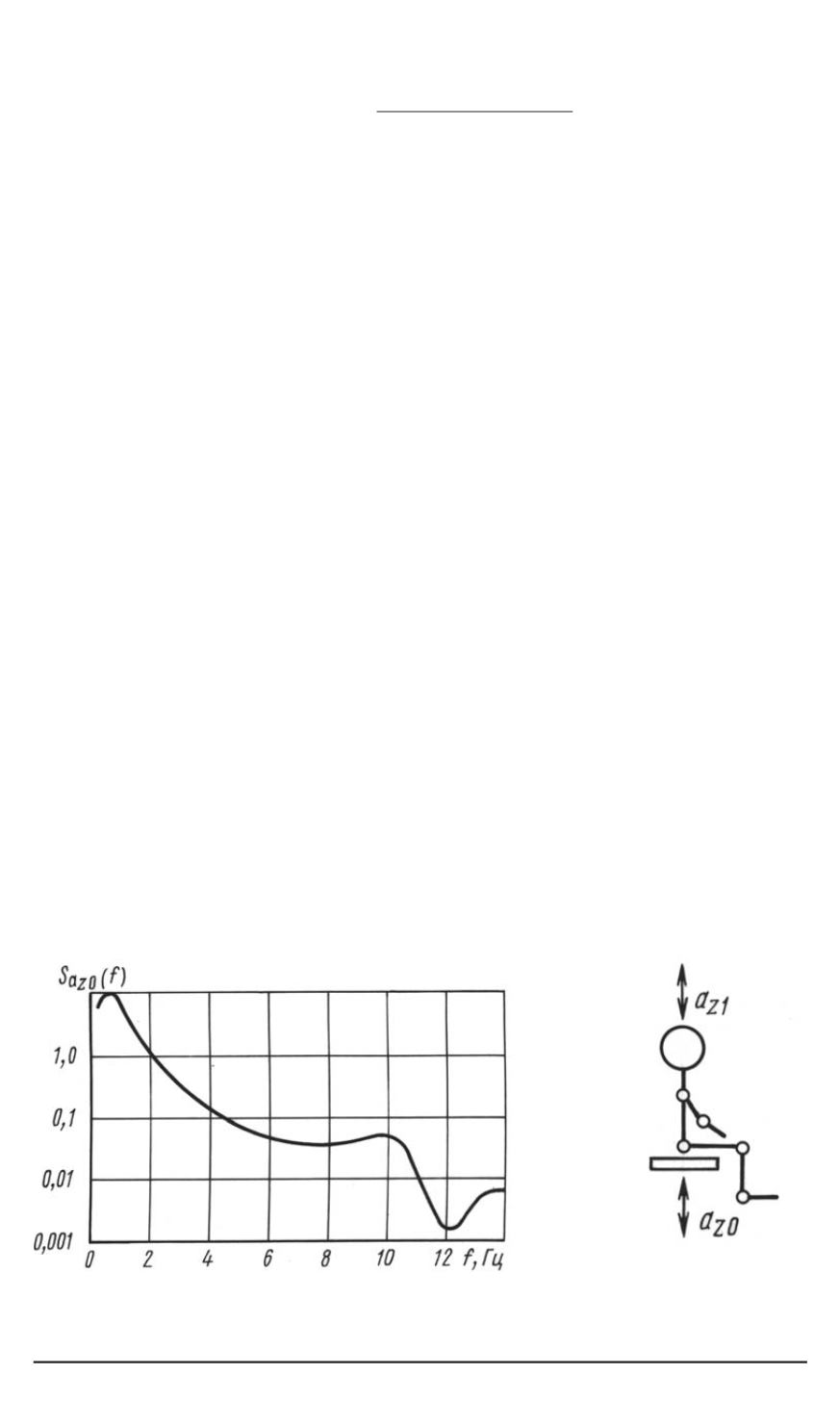
В качестве исходных данных возьмем спектральную плотность
S
a
z
0
(
f
)
ускорений на рабочем месте летчика на самолете F-4C [1],
показанную на рис. 2. (cм. [1]).
Поскольку при управлении высотой самолета имеет место в основ-
ном вертикальная вибрация, то в качестве рабочей позычеловека при-
мем схему, показанную на рис. 3.
На схеме, показанной на рис. 3,
a
z
0
— вибрационное ускорение на
рабочем месте,
a
z
1
— вибрационное ускорение, измеренное на голове
оператора по вертикальной оси.
Амплитудная частотная характеристика для указанной рабочей по-
зычеловека имеет вид, показанный на рис. 4. [см. [1]].
Рис. 2. Спектральная плотность вибраций на ра-
бочем месте летчиканасамолете F-4C
Рис. 3. Рабочая
позачеловека-
оператора
32 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 2


