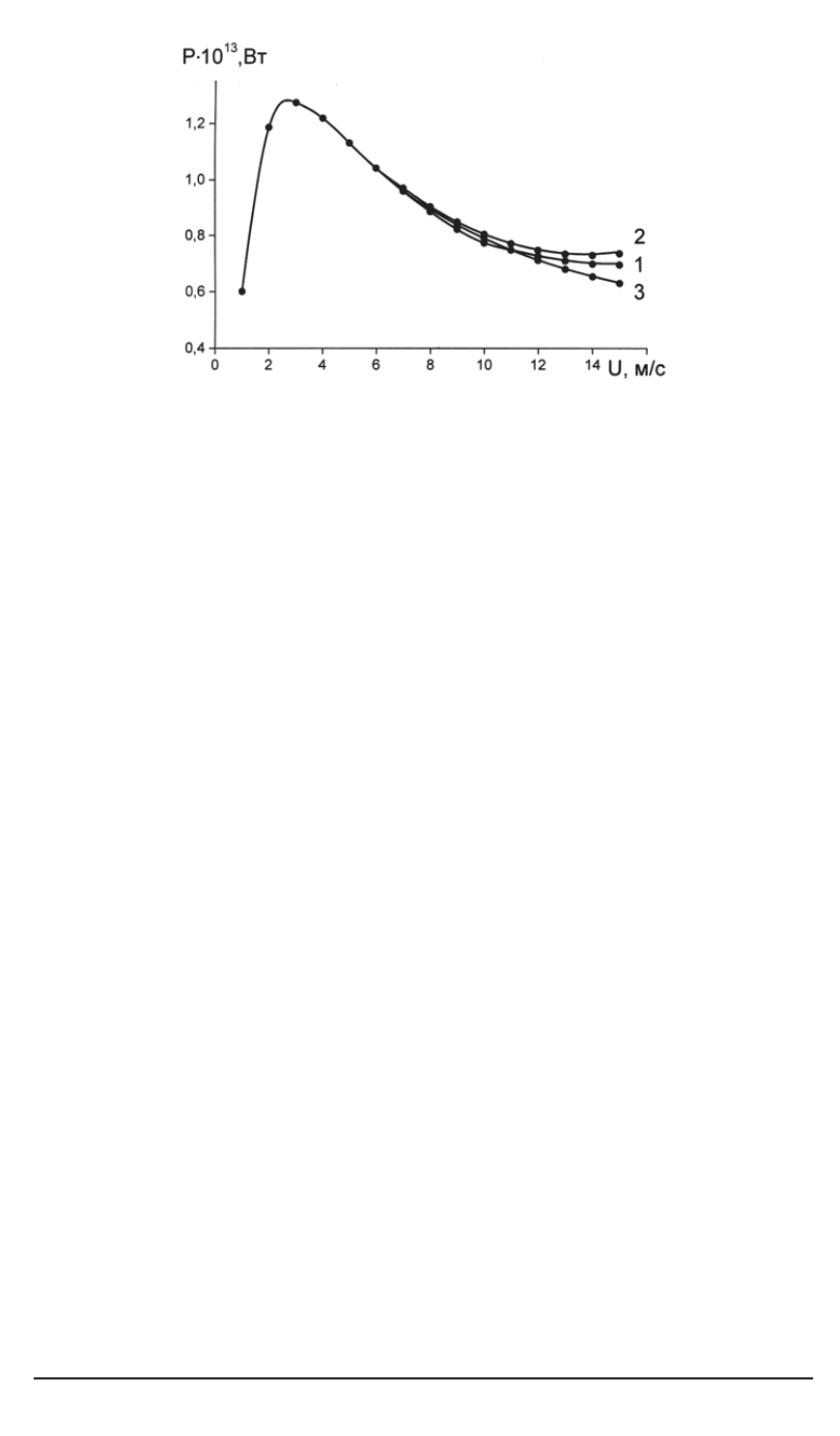
Рис. 3. Зависимость мощности
P
сигнала, принимаемого локатором, от ско-
рости приводного ветра для схемы наклонной моностатической локации;
θ
и
=
θ
п
= 7
◦
этом результаты расчетов для разных моделей пены слабо различаются
между собой.
В целом рис. 1. . . 3 показывают, что полученные модели сигналов
(для лазерных систем локации морской поверхности) хорошо описы-
вают мощность сигнала, принимаемого локатором, от взволнованной
морской поверхности для широкого диапазона скоростей приводно-
го ветра (включая большие значения
U,
когда на поверхности моря
появляется пена) — сплошные линии (расчеты по аналитической фор-
муле) практически совпадают с кружками (результатами численных
расчетов по интегральной формуле) на всех рисунках. Величина ско-
рости приводного ветра сильно влияет на мощность лазерного сигна-
ла. Степень и характер этого влияния существенно зависят от углов
локации и в общем случае от модели покрытия моря пеной. Последнее
особенно сильно проявляется для наклонной моностатической лоции
при углах, сильно отличающихся от вертикального.
СПИСОК ЛИТЕРАТУРЫ
1. П е л е в и н В. П. Метод локации волнующейся морской поверхности расхо-
дящимся световым импульсом / Световые поля в океане. – М.: ГОИН, 1980. –
С. 216–223.
2. Л у ч и н и н А. Г. О точности измерения параметров морской поверхности
оптическими скаттерометрами и альтиметрами // Изв. АН СССР. Физика атмо-
сферы и океана . – 1980. – Т. 16, № 3. – С. 305–315.
3. T s a i B. M., G a r d n e r C. S. Remote sensing of sea state using laser altimeter
// Appl. Opt. – 1982. – V. 21. – № 21. – P. 3932–3940.
4. Г у р е в и ч Г. С. О статистических характеристиках лазерного излучения,
отраженного от морской поверхности / Оптика моря. – М.: Наука, 1983. – С. 137–
142.
5. Д и с т а н ц и о н н ы й контроль верхнего слоя океана / В.М. Орлов,
И.В. Самохвалов, М.Л. Белов и др. – Новосибирск: Наука. СО, 1991. – 149 с.
10 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 3


