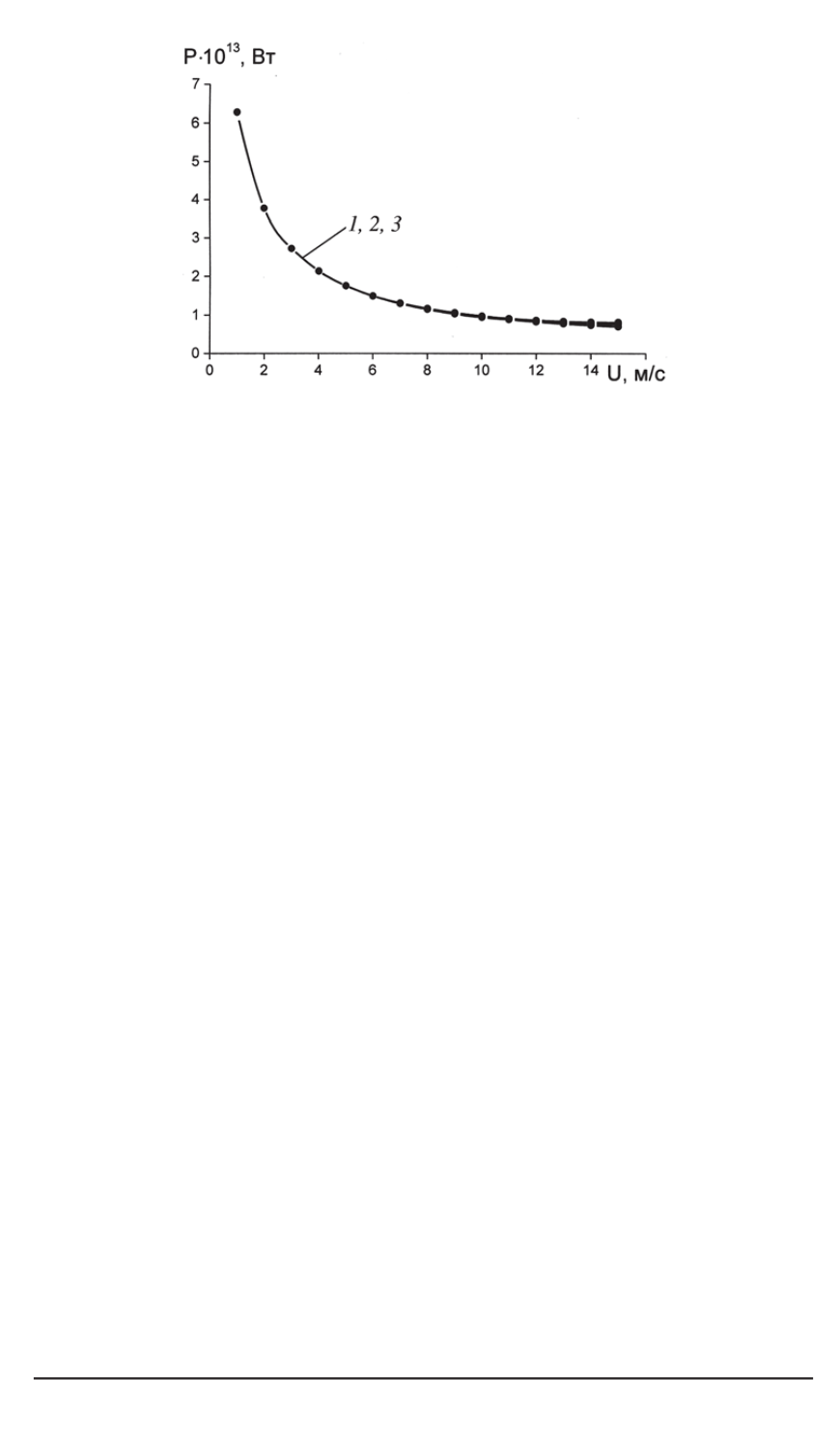
Рис. 1. Зависимости мощности
P
сигнала, принимаемого локатором, от скоро-
сти приводного ветра для схемы вертикальной моностатической локации
На рис. 1. . . 3 для разных схем локации в прозрачной атмосфере
приведены результаты расчета принимаемой мощности
P
в зависимо-
сти от скорости приводного ветра
U
(для моделей покрытия моря пе-
ной, приведенных в таблице) и сравнения аналитической модели с ре-
зультатами численных расчетов. Номера кривых на рисунках совпада-
ют с номерами моделей, приведенных в таблице. Результаты расчетов
по аналитической формуле (5) показаны сплошными линиями. Круж-
ки — это результаты численных расчетов по интегральным форму-
лам (1). . . (3). При проведении всех расчетов полагали, что
P
o
= 1
Вт,
V
2
= 0
,
02
,
T
п
=
T
и
=
T
aп
=
T
aи
= 1
,
τ
aи
=
τ
aп
= 0
.
На рис. 1 показаны результаты расчетов для схемы вертикальной
моностатической локации (например, для лазерного высотомера). Рас-
четы проводились при следующих значениях параметров:
θ
и
=
θ
п
= 0
;
L
и
=
L
п
= 10
3
м;
α
и
= 10
−
3
;
α
п
= 10
−
2
.
Из рис. 1 видно, что при вертикальной моностатической локации
принимаемая мощность сильно уменьшается с увеличением скорости
приводного ветра
U
. Физически это объясняется тем, что диаграмма
отражения морской поверхности с увеличением скорости приводного
ветра изменяется от квазизеркальной (при малых значениях
U
)
до
близкой к диффузной (при больших значениях
U,
когда на поверхности
моря много пены).
Результаты расчетов для различных моделей покрытия морской
поверхности пеной при вертикальной моностатической локации не-
значительно отличаются между собой — кривые
1. . . 3
практически
сливаются на рис. 1.
На рис. 2 показаны результаты расчетов для схемы наклонной мо-
ностатической локации (например, для сканирующей лазерной си-
стемы дистанционного зондирования морской поверхности) при угле
8 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 3


