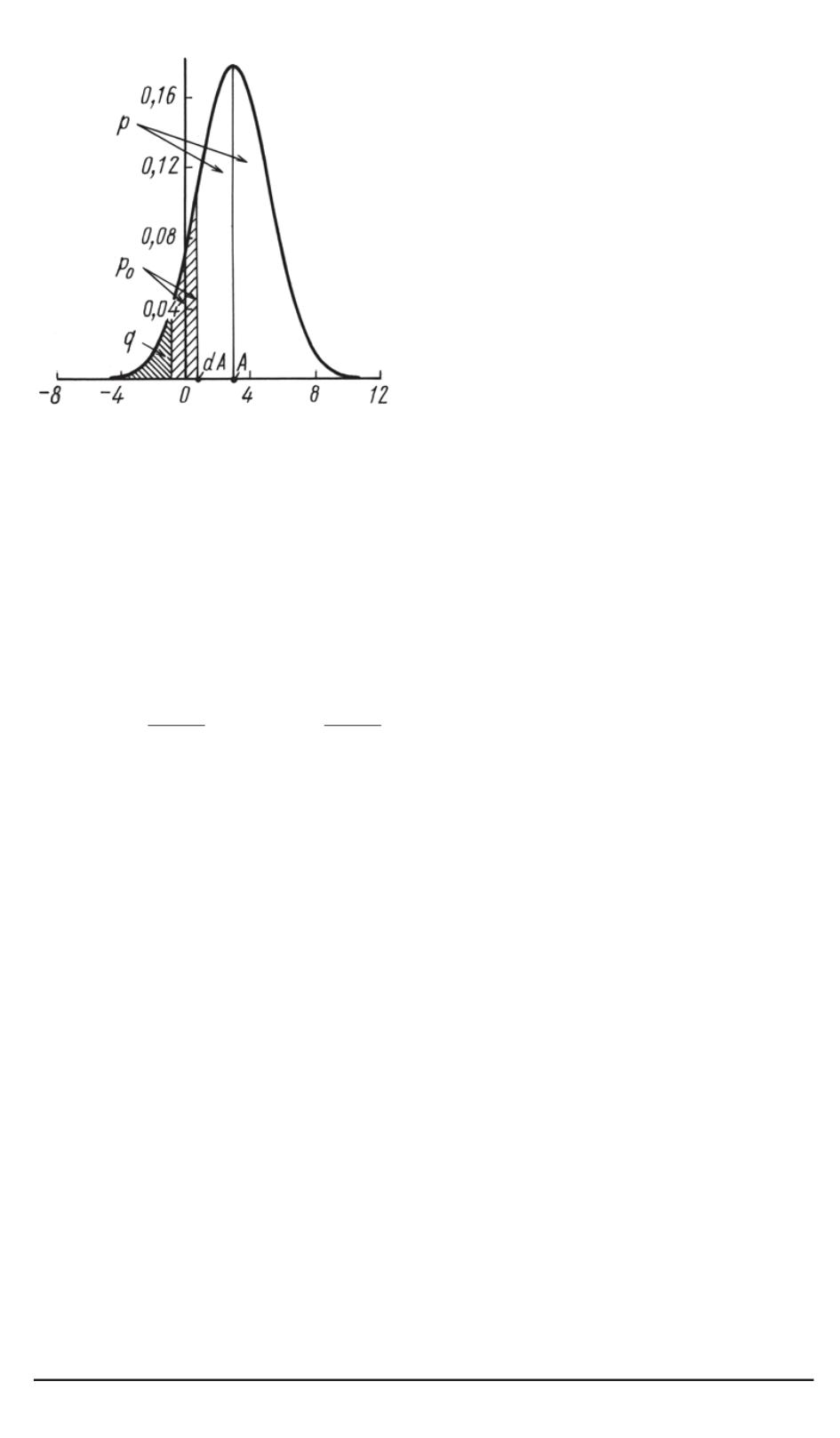
Рис. 6. ПРВ сигнала на входе ограни-
чителя УУ
На рис. 6 изображена ПРВ
сигнала на входе ограничите-
ля УУ. Вероятность правиль-
ного отсчета определяется как
р
=
+
∞
Δ
А
W
(
x
)
dx
; вероятность про-
стоя
р
0
=
−
Δ
А
Δ
А
W
(
x
)
dx
; вероят-
ность ошибки
q
=
−
Δ
А
−∞
W
(
x
)
dx
.
Вероятность того, что произой-
дет правильное регулирование на
n
-м шаге
P
(
n
) =
P
(
n
−
1
, N
REG
−
−
1)
p
, где
P
(
n
−
1
, N
REG
−
1)
— это вероятность накопления
(
N
REG
−
1)
правильных отсчетов на
(
n
−
1)
-м шаге накопления,
причем
n
≥
N
REG
(
N
REG
— размер накапливающего счетчика);
P
(
n
−
1
, N
REG
−
1)
определяется по формуле вероятности для бино-
миального распределения с некоторой добавкой:
P
(
n
−
1
, N
REG
−
1) = (1
−
q
)
n
−
1
C
N
REG
−
1
n
−
1
(
p
)
N
REG
−
1
(
p
0
)
n
−
N
REG
,
где
p
=
p
1
−
q
и
p
0
=
p
0
1
−
q
, тогда
p
+
p
0
= 1
;
(1
−
q
)
N
REG
−
1
—
вероятность продолжения правильного слежения. Тогда
P
(
n
−
1
, N
REG
−
1) =
C
N
REG
−
1
n
−
1
p
N
REG
−
1
p
n
−
N
REG
0
,
P
(
n
) =
C
N
REG
−
1
n
−
1
p
N
REG
p
n
−
N
REG
0
.
Вероятность того, что следующий сброс произойдет в результате пра-
вильного регулирования равна
P
=
∞
n
=
N
REG
P
(
n
)
.
Аналогично рассчитывается вероятность неправильного регулиро-
вания
Q
.
В рассматриваемой схеме время регулирования непостоянно (полу-
марковская цепь), и присутствует зона нечувствительности, что делает
аналитические расчеты трудоемкими.
Рассмотрим зависимость времени до первого регулирования от
ОСШ. При ОСШ
→ ∞
, т.е. когда помехи практически не влияют на
сигнал, время становится постоянным и равным размерности счетчика
T
∗
N
REG
, накапливающего входные отсчеты. При уменьшении ОСШ,
т.е. увеличении влияния помехи, происходит значительное увеличение
времени до первого регулирования
T
REG
, причем для больших значе-
ний
N
REG
время до первого регулирования растет намного быстрее,
30 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 1


