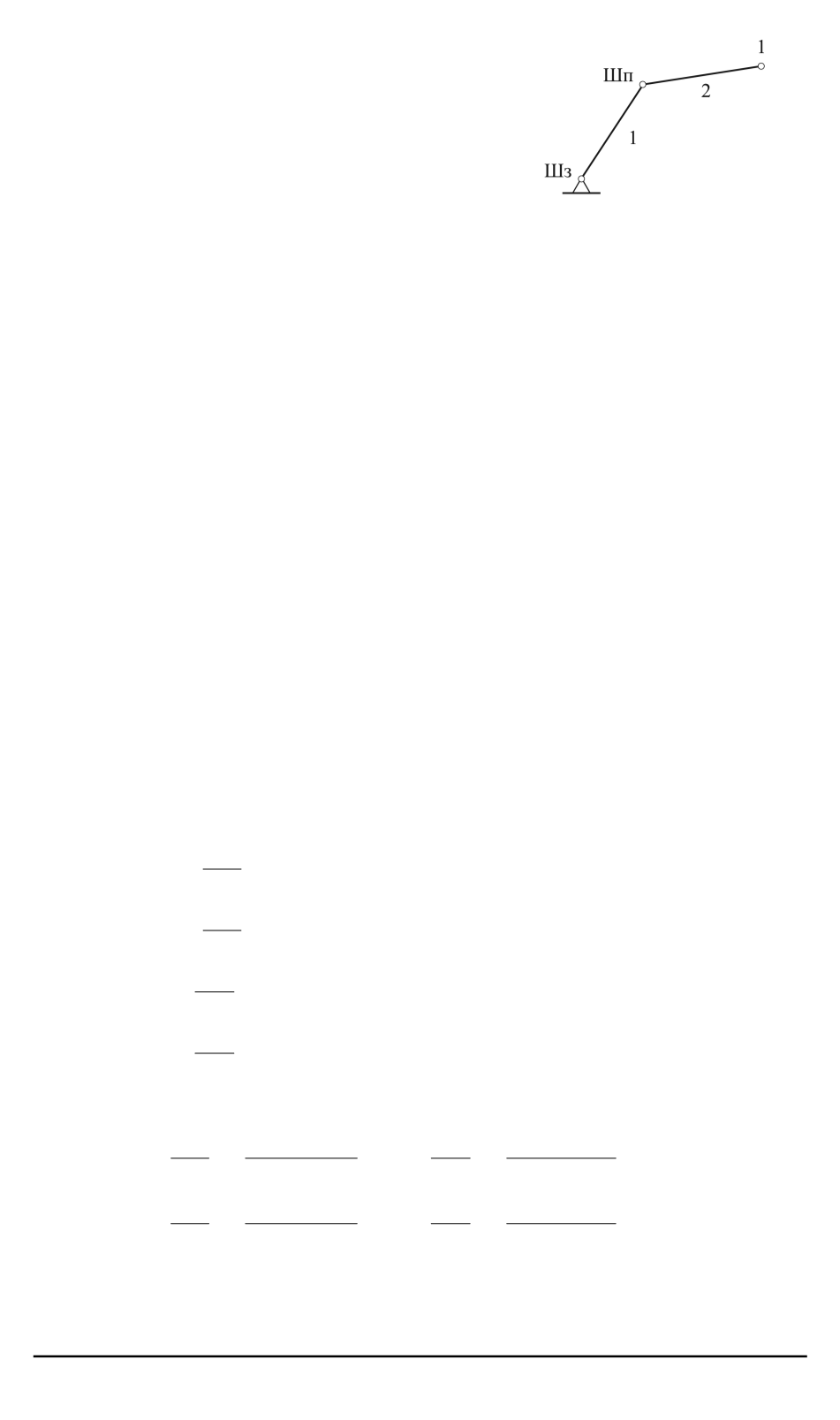
Рис. 1. Двухзвенная двумерная
механическая система:
Шз — шарнир, закрепленный на
основании; Шп — шарнир, связы-
вающий звенья 1 и 2
для разомкнутых кинематических схем,
для применения уравнений Лагранжа
второго рода необходимо предположе-
ние идеальности связей, при использо-
вании принципа Гаусса на каждом шаге
численного интегрирования приходится
решать задачу минимизации.
Цель данной работы — рассмотреть
один из вариантов решения обратной за-
дачи с помощью универсальных систем
моделирования динамических объектов.
Математическая модель.
В настоящее время в мире использу-
ется много программ многоаспектного моделирования динамических
объектов, наиболее известными из которых являются программы
AMEsim, MathModelica, SimulationX, ПА9, PRADIS [2–6]. По характе-
ру реализованного в них математического обеспечения эти программы
близки к комплексу программ ПА9. Ни в одной из указанных про-
грамм явным образом не заявлено о возможности решения обратной
задачи, также необходима методика ее решения.
Рассмотрим получение математической модели для двухзвенной
двумерной механической системы (рис. 1). В предположении, что си-
стема расположена в горизонтальной плоскости, запишем уравнения
динамики системы, последовательно разрывая наложенные связи и
заменяя их силами и моментами реакции, действующими на каждое
звено. Уравнения для численного решения неявным методом Эйлера
на одном (
n
-м) шаге интегрирования имеют вид:
m
1
dV
1
dt
+
F
S
1
+
F
S
2
= 0;
(1)
m
2
dV
2
dt
−
F
S
2
+
F
P
= 0;
(2)
J
1
dω
1
dt
+
M
(
F
S
1
) +
M
(
F
S
2
) = 0;
(3)
J
2
dω
2
dt
−
M
(
F
S
2
) +
M
(
F
P
) = 0;
(4)
F
S
1
−
C
1
x
1
= 0;
F
S
2
−
C
2
x
2
+
C
1
x
1
= 0;
(5)
dV
1
dt
−
V
1
−
V
n
−
1
1
h
= 0;
dω
1
dt
−
ω
1
−
ω
n
−
1
1
h
= 0;
(6)
dV
2
dt
−
V
2
−
V
n
−
1
2
h
= 0;
dω
2
dt
−
ω
2
−
ω
n
−
1
2
h
= 0;
(7)
x
1
−
x
n
−
1
1
−
V
1
h
= 0;
x
2
−
x
n
−
1
2
−
V
2
h
= 0;
(8)
ϕ
1
−
ϕ
n
−
1
1
−
ω
1
h
= 0;
ϕ
2
−
ϕ
n
−
1
2
−
ω
2
h
= 0
,
(9)
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 1 95


