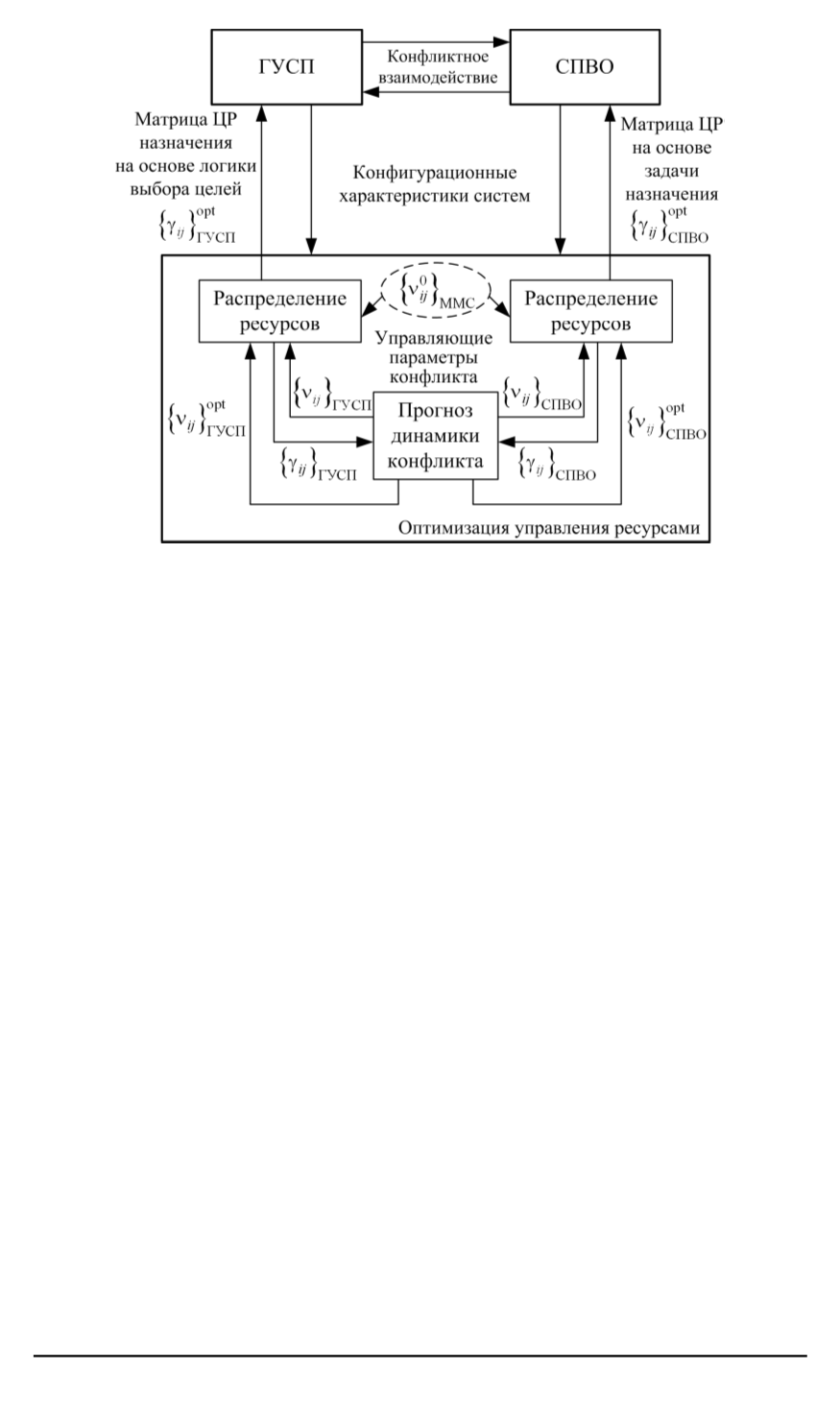
Рис. 5. Общая схема алгоритма получения обобщенного ЦР
СПВО (так как ЗРК различаются по дальности действия) разделен на
три этапа: дальнего, среднего и ближнего взаимодействия.
Схема процесса взаимодействия ГУСП и СПВО МО по этапам по-
казана на рис. 6, где обозначены моменты времени, соответствующие
следующим событиям:
T
0
— момент обнаружения группировки целей
(ГУСП);
T
1
,
T
2
,
T
3
— моменты вхождения целей в зону ЦР комплексов
большой; средней и малой дальностей;
T
4
— момент встречи целей с
объектом обороны.
Для иллюстрации модели прогноза конфликтно-оптимального вза-
имодействия, которая является основой для расширения СИМ до уров-
ня СОИМ (см. рис. 3), без ограничения общности подхода рассмотрим
структуру модели прогноза динамики конфликта и постановку задачи
на основе приведенного алгоритма получения обобщенного ЦР для
схемы, приведенной на рис. 6.
Рассматривается СПВО МО в общем случае из
N
кораблей. Вво-
дятся следующие обозначения.
1.
Переменные, характеризующие состояние системы:
X
1
и
X
2
— число объектов ГУСП активного типа и информацион-
ного обеспечения;
ˉ
X
3
i
,
ˉ
X
4
i
и
ˉ
X
5
i
— число объектов СПВО МО большой, средней и
малой дальностей на
i
-м корабле;
X
6
i
— живучесть
i
-го корабля (число попаданий в борт корабля);
X
7
i
— боеспособность
i
-го корабля (число работающих излучаю-
щих станций).
18 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 3


