J
ГУСП
=
X
i
J
i
ГУСП
(u
1
,
u
2
)
, J
СПВО
=
X
j
J
j
СПВО
(u
1
,
u
2
)
,
где
u
1
,
u
2
— векторы управления ресурсами ГУСП и СПВО МО, то
равновесный режим управления ресурсами
u
p
= (
u
p
1
,
u
p
2
)
формирует
систему неравенств критерия конфликтно-оптимальной эффективно-
сти сторон (равновесия по Д. Нэшу)
J
СПВО
(u
p
1
,
u
2
)
≤
J
СПВО
(u
p
1
,
u
p
2
)
,
J
ГУСП
(u
1
,
u
p
2
)
≤
J
ГУСП
(u
p
1
,
u
p
2
)
,
которая имеет смысл потери в эффективности коалиций СПВО МО и
ГУСП при отклонении от равновесия, если другая сторона придержи-
вается равновесия.
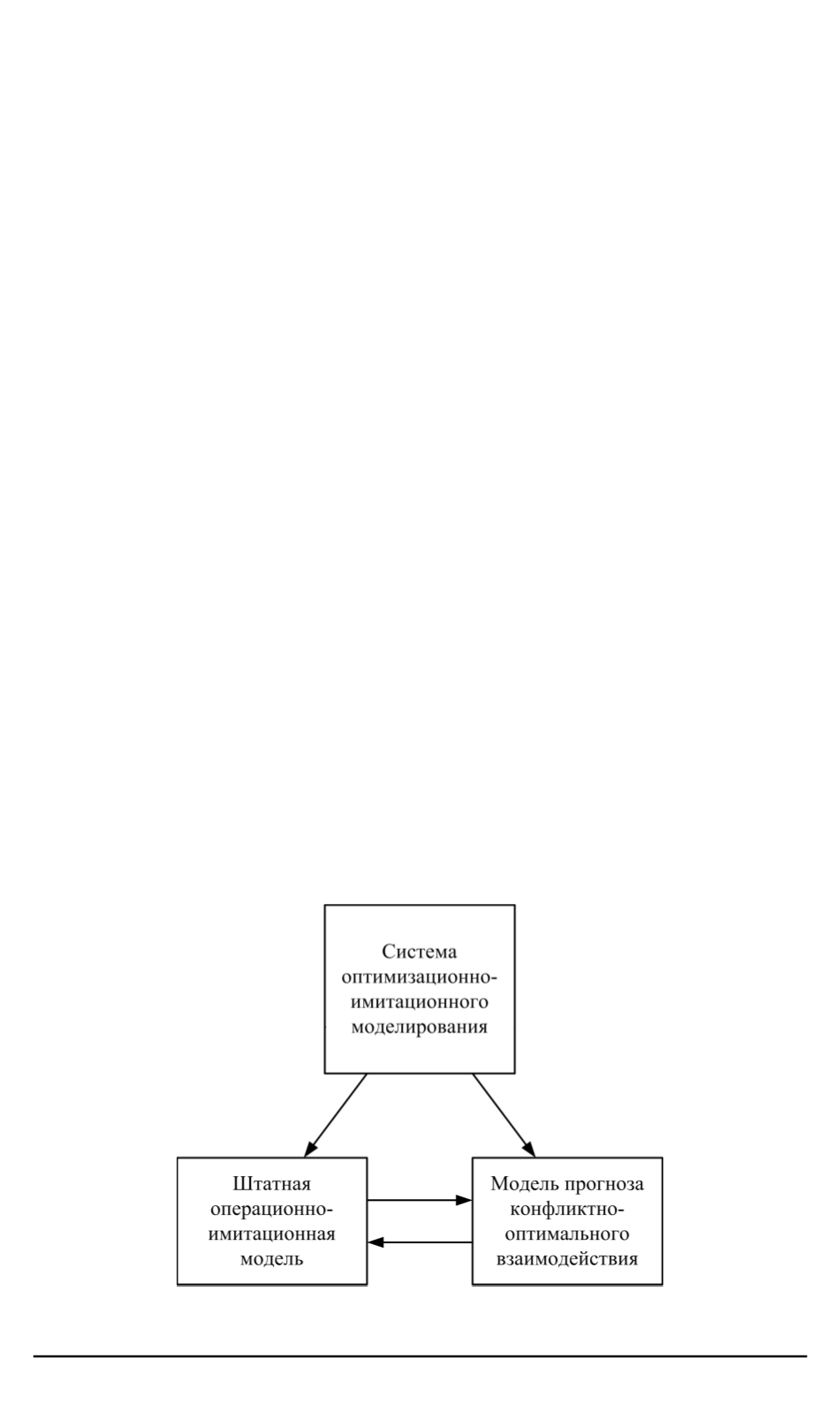
Для формирования и учета конфликтно-оптимальных равновесных
решений СИМ обобщается до системы оптимизационно-имитационного
моделирования (СОИМ) (рис. 3), которая помимо штатной операционно-
имитационной модели включает в себя модель прогноза конфликтно-
оптимального взаимодействия для коррекции штатного режима упра-
вления ресурсами ГУСП и СПВО МО до уровня конфликтно-опти-
мального управления. Это повышает адекватность достижимых оце-
нок эффективности группировки УСП по преодолению системы
ПВО МО и поражению кораблей МО. Модель прогноза конфликтно-
оптимального взаимодействия реализуется в СОИМ посредством ал-
горитма прогноза динамики конфликта (ПДК), обращения к которому
осуществляются последовательно или совместно. При последова-
тельном использовании алгоритма уточняются параметры и условия
выполнения штатного режима взаимодействия на каждом рубеже
Рис. 3. Обобщенная структура СОИМ
14 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 3


