














 2 / 14
2 / 14

А.И. Гаврилов, Со Со Тав У
72
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2016. № 6
ки движения используются для управления виртуальной рукой (захватывание и
вращения запястья). Заявленная вероятность распознавания типа движений
составила 84 %.
В работе [6] рассмотрена зависимость измерений ЭМГ-сигналов от ряда па-
раметров, таких как амплитуда, временн
á
я и частотная составляющие. Прове-
ден анализ зависимости параметров ЭМГ-сигналов на биологически активных
точках от силы захвата кисти руки. Для определения четырех различных типов
движения локтевого сустава использованы оценка среднеквадратического зна-
чения ЭМГ-сигнала и элементы анализа главных компонент для проверки дви-
жений локтя. Акцент в работе сделан на исследовании двух основных типов
движения (разгибании и супинации), что обусловлено анатомией локтя и воз-
можностью реализации указанных движений с помощью протезов.
Анализ многочисленных работ в области биологии, анатомии и биоинфор-
матики позволяет сделать заключение, что движение лучезапястного сустава
обеспечивается в основном работой предплечья [2]. Таким образом, исследова-
ние взаимосвязи между движением лучезапястного сустава и ЭМГ-сигналами
мышц является важной задачей при разработке систем управления многофунк-
циональными протезами (СУМФП) [7].
Структура и основные принципы функционирования биоинформаци-
онной системы.
Целью работы является разработка классификатора ЭМГ-
сигналов предплечья, предназначенного для распознавания движения луче-
запястного сустава (рис. 1).
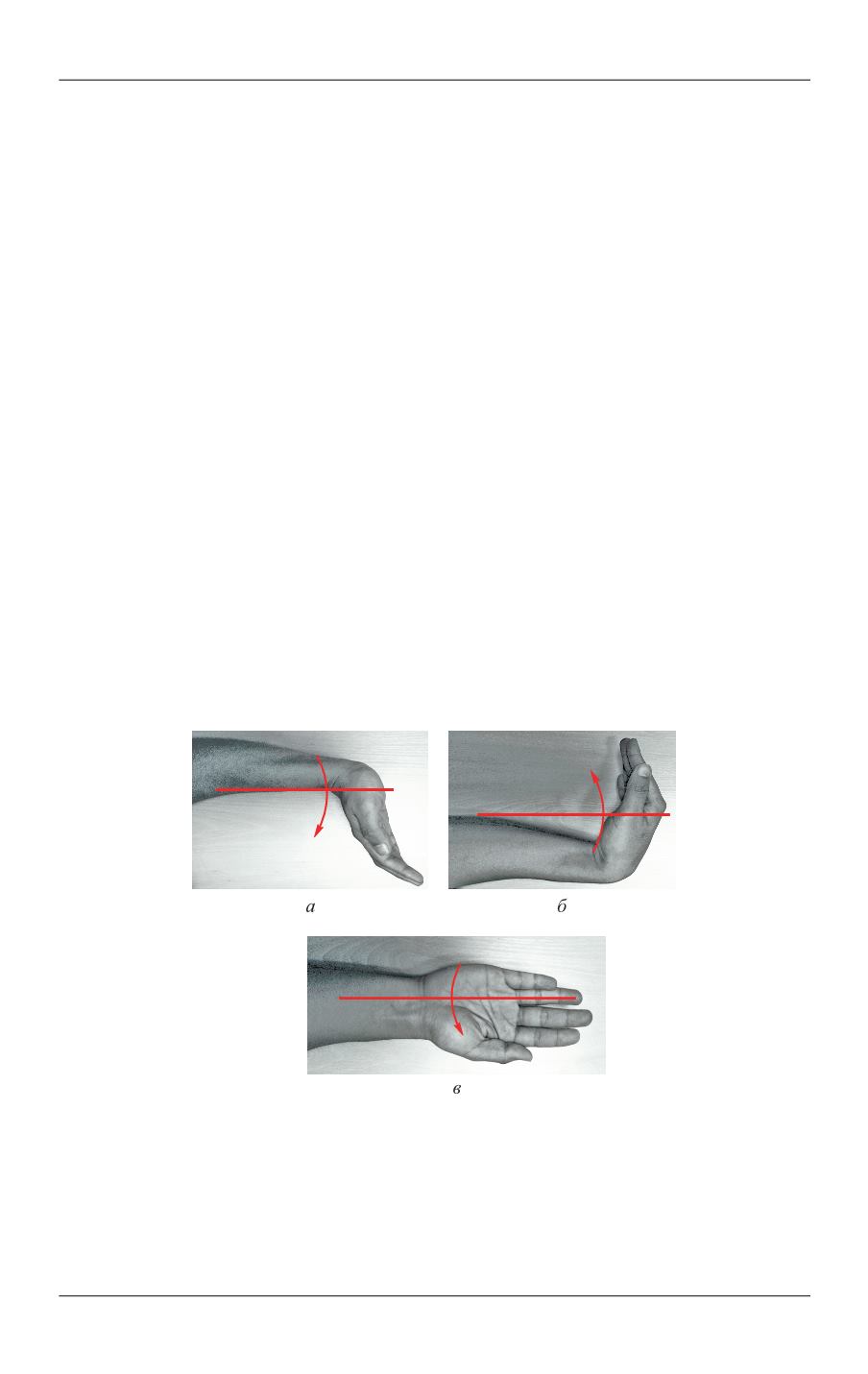
Рис. 1.
Различные типы движения лучезапястного сустава: разгибание (
а
),
сгибание (
б
), супинация (
в
)
Для получения ЭМГ-сигналов используются три датчика, расположенные на
разгибателе пальцев, локтевом разгибателе запястья и поверхностном сгибателе
пальцев (рис. 2).