














 13 / 17
13 / 17

В.В. Девятков, А.Н. Алфимцев, А.Р. Таранян
66
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2016. № 6
в котором маска не применялась, использовались метрика
eigen
D
и функция
признаков
.
RGB Radial
A B
Заключение.
В работе рассмотрена задача отслеживания, локализации и клас-
сификации людей в видеопотоках с нескольких камер, решение которой является
ключевым при разработке систем видеонаблюдения и обеспечения безопасности
[15], интеллектуальных мультимодальных интерфейсов [16] и роботов, взаимодей-
ствующих с людьми [17]. Предложен метод локализации людей на основе селек-
тивной маски, классификации на основе ковариационных дескрипторов, отслежи-
вании в видеопотоках с нескольких камер, в различных местоположениях, под
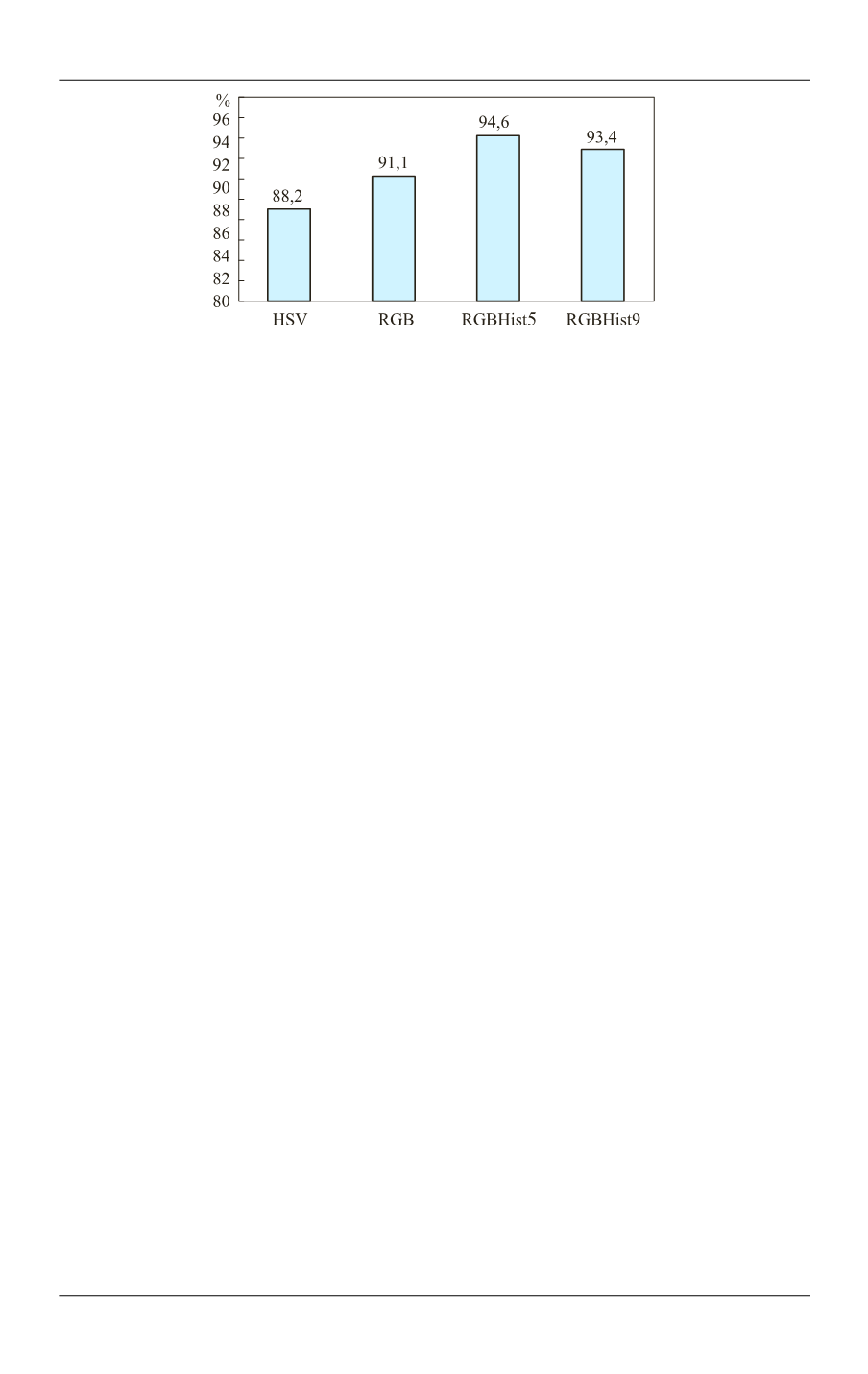
различными углами, с разным «фоном», позволивший повысить от 75 до 94,6 %
эффективность классификации людей, что является весьма хорошим результатом,
учитывая сложность тестовых данных. Ключевой особенностью предложенного
метода является возможность классифицировать людей на основе ковариа-
ционного дескриптора, минуя этап его обучения.
В процессе разработки метода, изложенного в настоящей статье, была
апробирована маска, позволяющая отфильтровывать значительную часть тех
пикселей ОИ, которые являются фоновыми, была выбрана наиболее подходя-
щая для данной задачи метрика для ковариационных дескрипторов, рассмот-
рены популярные функции признаков, разработаны новые и проведен деталь-
ный экспериментальный анализ эффективности их применения.
Однако вычислительная сложность и вероятность ложной локализации
объекта резко возрастают при увеличении скорости движения объекта, попада-
нии его в поле зрения нескольких камер в различных местоположениях и под
разными углами с разным фоном, увеличении размерности кадра и числа камер.
Учитывая это, на основе метода пространственно-временного анализа ситуаций
на множестве движущихся объектов, изложенного в работе [18], в целях более
полного анализа поведения людей и снижения вычислительных затрат предпо-
лагается дальнейшее развитие методов множественной локализации областей
интересов отдельных объектов, формирования дескрипторов для этих областей,
введения отношений между классифицированными объектами и моделями их
динамического поведения.
Рис. 10.
Сводная таблица функций признаков