емых для двухчастотной (
σ
f
) и двухантенной (
σ
h
) систем. На рис. 7,
б
приведены соответствующие графики зависимостей
Q
=
˙
A
12
max
σ
2
ш
,
где
˙
A
12
max
— максимальное значение модуля
˙
A
12
из двух частотных
каналов (
σ
f
) или двух подрешеток (
σ
h
);
σ
2
ш
— мощность собствен-
ных шумов системы. В двухчастотной системе измерительная база
L
f
= 64
λ
, а в двухантенной системе
L
h
= 32
λ
, так как антенна разби-
та на две подрешетки. На этих же рисунках приведены результаты для
двухчастотной системы с увеличенной в 2 раза измерительной базой
L
f
= 128
λ
(штриховые линии).
Из приведенных графиков следует, что при том же суммарном раз-
мере апертуры точность измерения угла места в двухчастотной систе-
ме выше, чем в двухантенной, так как
L
f
> L
h
. Точности измерения
угла места достаточно высокие при отношениях сигнал/шум больше
30 дБ. На углах места, меньших 15
0
, точность довольно быстро ухуд-
шается. За счет увеличения измерительной базы
L
можно обеспечить
приемлемую точность и на этих углах места (см. штриховую кривую
на рис. 7,
а
).
Обычной практикой при измерении малых углов места является
установка антенных систем на высоких мачтах порядка нескольких
десятков метров. Поэтому было проведено статистическое моделиро-
вание предлагаемого метода для такого размещения антенных систем.
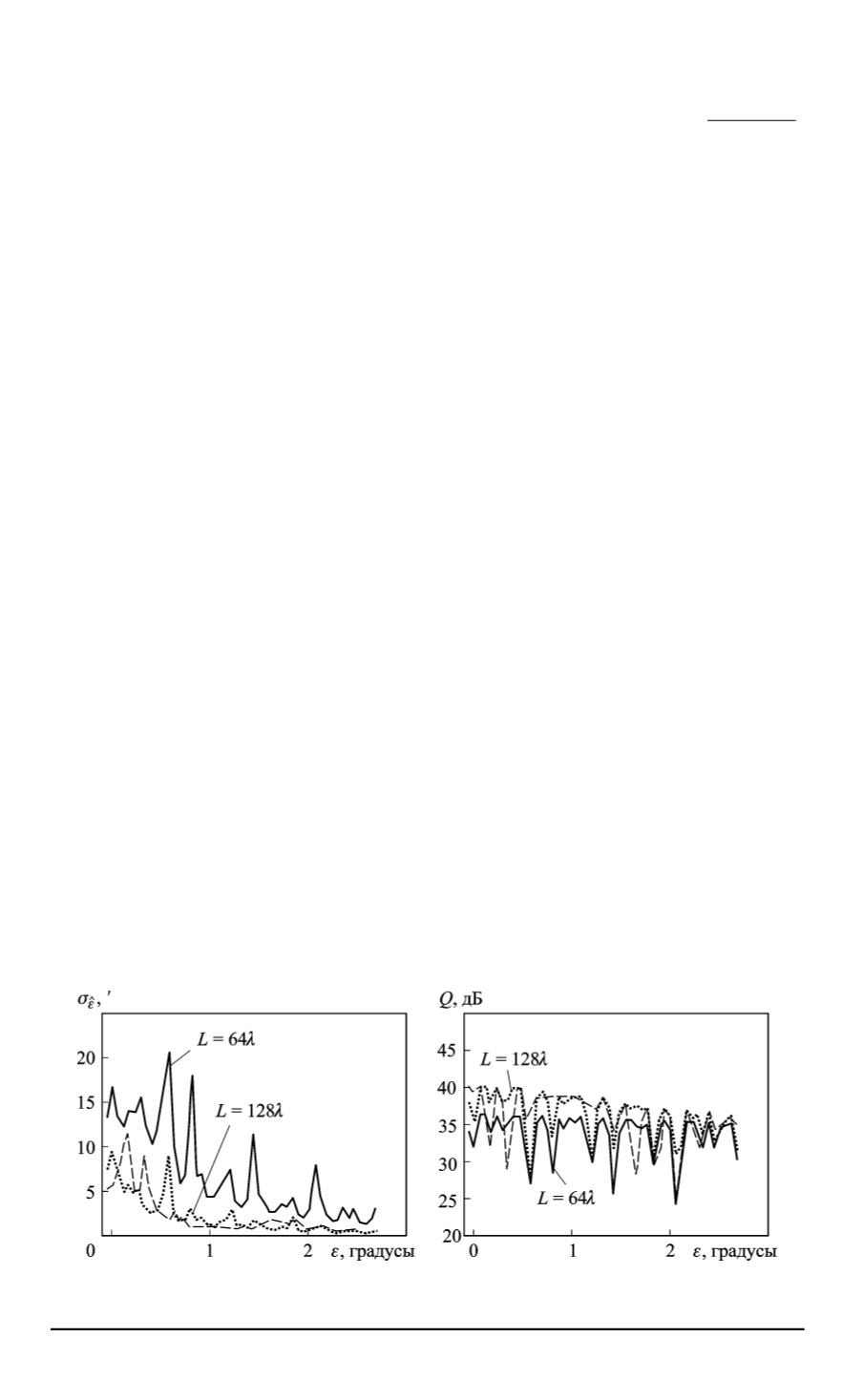
На рис. 8 представлены результаты моделирования для случая установ-
ки антенны на высоту 40 м и использовании двухчастотного метода с
10%-ным разносом частот.
Из рис. 8 следует, что с подъемом антенны глубина интерференци-
онных “провалов” становится меньше и, соответственно, возрастает
точность измерения углов. Изменением разноса рабочих частот мож-
но менять положение интерференционных минимумумов и обеспечить
Рис. 8. Точностные характеристики для высоты установки антенны 40 м
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 1 11


