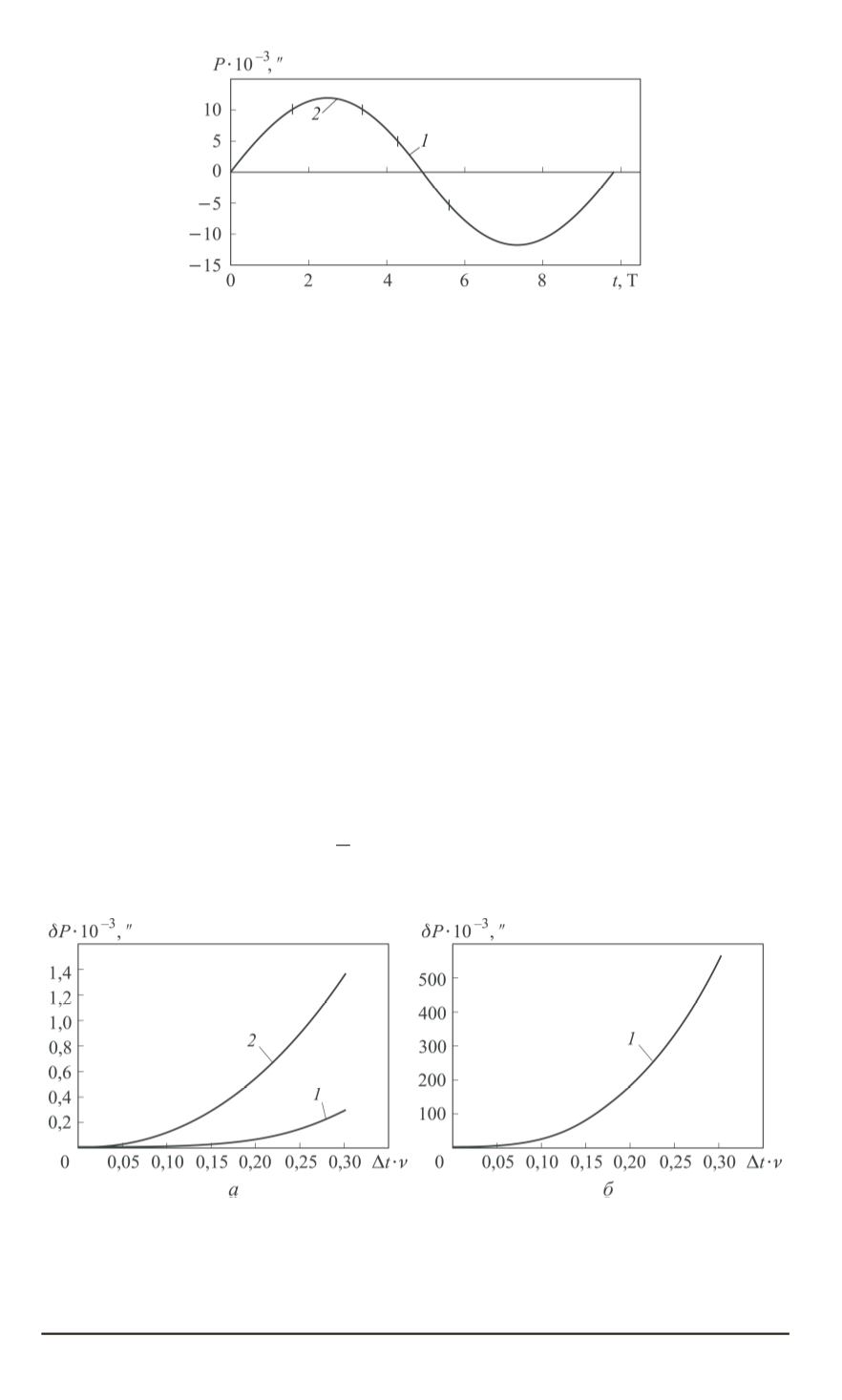
Рис. 7. Функция крутильных колебаний:
1
— область постоянной угловой скорости,
2
— область переменной угловой скорости
В ошибку при аппроксимации линейной или квадратичной функцией по-
падают члены выше первого или второго порядков соответственно. Графики
зависимости ошибки
δP
от времени подмены
Δ
t
представлены на рис. 8.
В дальнейшем точками на графике представлены экспериментальные резуль-
таты, полученные на объекте, на котором установлен ЗЛГ со следующими
параметрами:
1. Значение шума за 1 такт съема — 1,6
00
.
2. Такт съема информации
Т
= 5
мс.
3. Амплитуда угловых колебаний
A
Ω
= 12000
00
/с.
4. Частота угловых колебаний
ν
= 20
Гц.
Наиболее опасным является участок с переменным угловым ускорением.
На рис. 9 приведены графики зависимости ошибки от амплитуды угловой
скорости угловых колебаний для подмены на время 0,1/
ν
, 0,15/
ν
, 0,2/
ν
(т.е.
на
Т
,
2
Т
,
3
Т
). Как видно из рис. 9 и 10, линейная функция (константа)
эффективна только до 0,1/
ν
, квадратичная — до 0,2/
ν
. На рис. 11 представлена
зависимость шумовой ошибки
θ
неподвижного ЗЛГ от времени подмены
Δ
t
.
Наилучшие результаты получены при подмене константой. При этом ошибка
по уровню 3
σ
составляет
A
ш
√
n/
2
, где
A
ш
— угловая амплитуда шума в одном
такте съема информации,
n
— число подменяемых тактов съема информации.
Рис. 8. Зависимости ошибки
δP
от произведения времени подмены
Δ
t
и частоты
крутильных колебаний
ν
:
а
— область постоянной угловой скорости,
б
— область переменной угловой скорости;
1
— подмена квадратичной функцией;
2
— подмена линейной функцией
22 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 2


