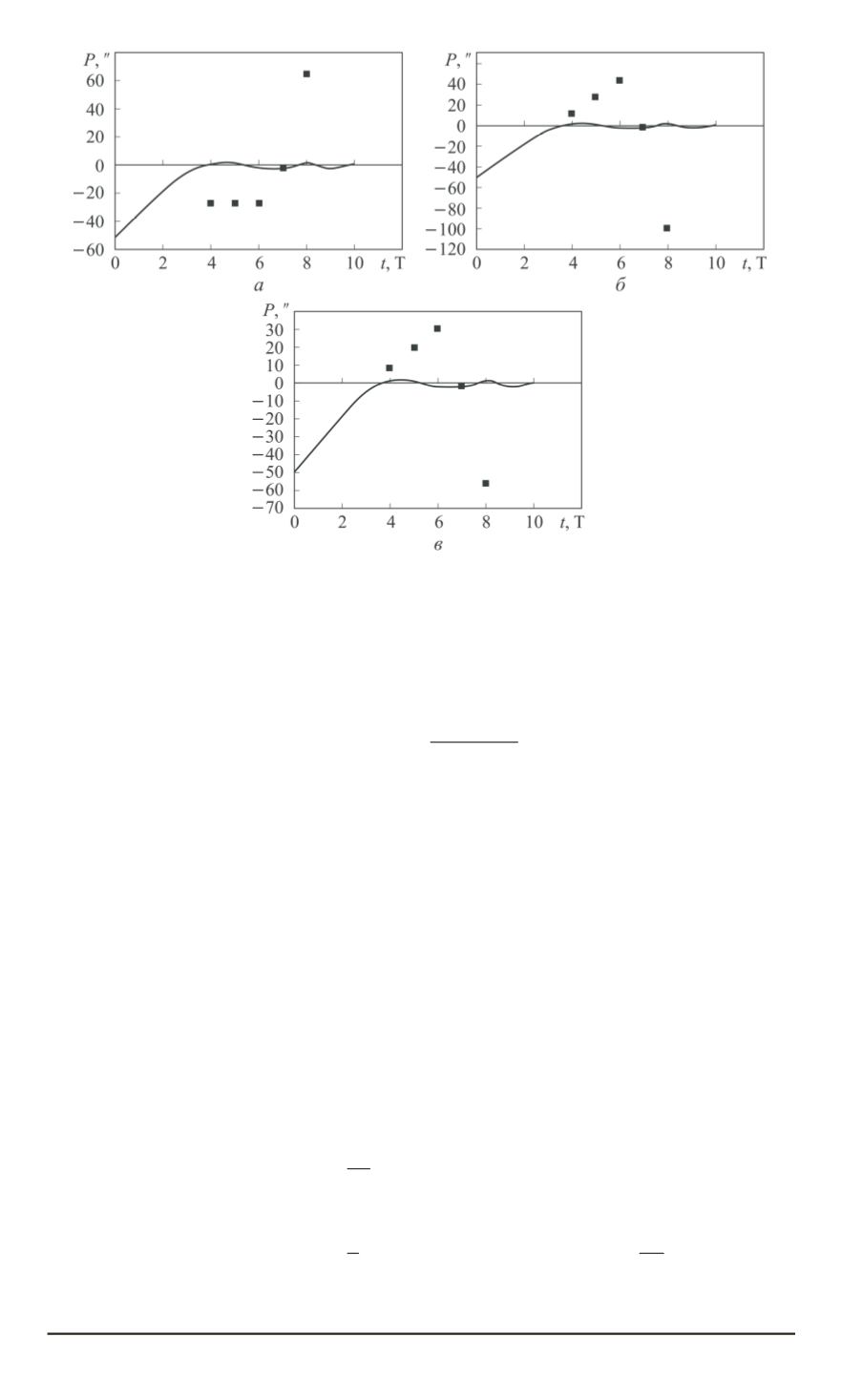
Рис. 6. Подмена показаний ЗЛГ на время переключения мод
Ошибки аппроксимации складываются из неточной аппроксимации ука-
занными функциями реальных угловых колебаний ЗЛГ и дополнительной
ошибки
θ
, связанной с шумом выходной информации. Поскольку эти ошиб-
ки независимы, можно считать, что максимальная ошибка при каждом пере-
ключении
δP
max
равна
δP
max
=
p
δP
2
+
θ
2
.
(19)
Значение аппроксимационной ошибки
δP
зависит от того, насколько
реальное изменение угловой скорости в момент переключения отличается
от предлагаемых полиномов первого и второго порядков. Отметим, что в
предлагаемом методе аппроксимация константой не отличается от линейной
функции, поскольку среднее значение линейной функции, проведенной через
четыре равноотстоящие друг от друга точки, равно среднему значению этих
четырех точек. Обычно ЗЛГ имеет ограничение сверху по частоте угловых
колебаний
ν
, равное
0
,
1
/
Т
. Переключение мод может происходить в любой
момент, поэтому для нас интересны две области — в районе практически
постоянной угловой скорости и в районе экстремумов (рис. 7).
Разложим функцию крутильных колебаний вида
A
Ω
sin(2
πνt
)
в ряд Тей-
лора в окрестностях точек
t
= 0
и
t
= 1
/
(4
ν
)
:
A
Ω
sin(2
πνt
) = 2
A
Ω
πν
Δ
t
−
A
Ω
π
3
ν
3
Δ
t
3
+
+
4
15
A
Ω
π
5
ν
5
Δ
t
5
−
O
(Δ
t
7
)
, t
= 0;
A
Ω
sin(2
πνt
) =
A
Ω
−
2
A
Ω
π
2
ν
2
Δ
t
2
+
+
2
3
A
Ω
π
4
ν
4
Δ
t
4
−
O
(Δ
t
6
)
, t
=
1
4
ν
,
(20)
где
Δ
t
— время, на которое осуществляется подмена.
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 2 21


