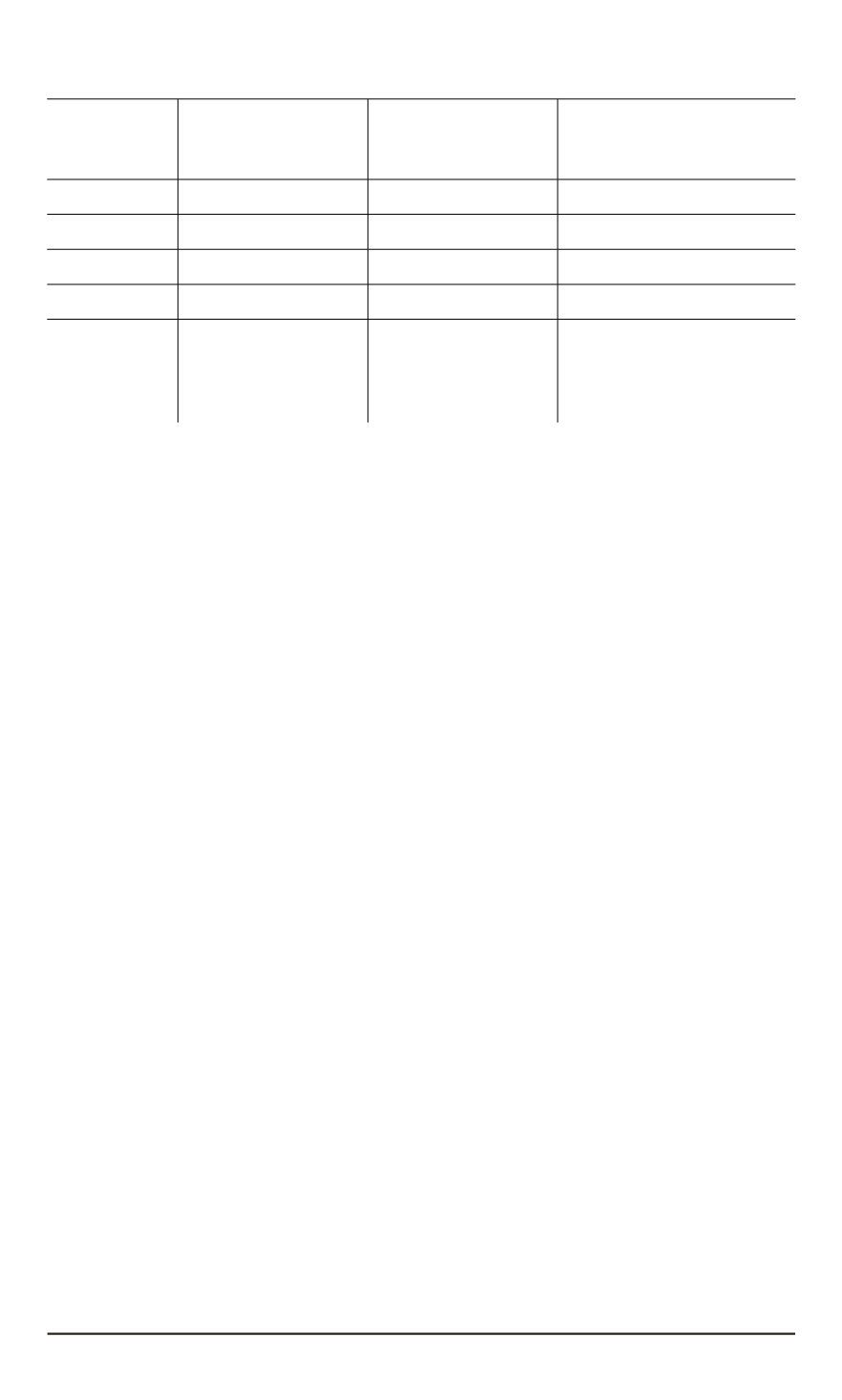
Таблица 2
Номер такта
коммутации
подставки
Измеренный
кажущийся дрейф
ΔΩ
СРП
,
◦
/ч
Расчетный
кажущийся дрейф
ΔΩ
СРП
,
◦
/ч
Расхождение между
измеренным и расчетным
значением,
◦
/ч
1
4056
3720
336
2
2956
2385
571
3
1306
1480
– 174
4
207
278
– 71
Среднее
значение
кажущегося
дрейфа
2131 (накопленный
угол за 4 такта 43
00
)
—
166 (накопленный угол за
4 такта 3,3
00
)
циальной навигации необходимо иметь непрерывную информацию. Самый
простой подход — это использовать для аппроксимации константу, рассчитан-
ную как среднее значение показаний ЗЛГ за несколько тактов коммутации
подставки до переключения.
В реальной эксплуатации гироскоп вращается не только с постоянной
угловой скоростью, но и угловым ускорением. Причем обычным явлением
являются угловые колебания, т.е. переменное угловое ускорение. Таким обра-
зом возникает выбор, полиномом какого порядка выполнять экстраполяцию.
Интересны три основных варианта: подмена ложных показаний константой,
аппроксимация прямой и аппроксимация параболой, рассчитанными по не-
скольким показаниям, предшествующим смене мод.
Очевидно, что более точное приближение будет, если использовать точки,
прилегающие к переходному процессу с обеих сторон. Исходя из общих
принципов аппроксимации, предлагается четырехшаговый алгоритм:
— до начала смены мод по нескольким точкам вычисляются коэффици-
енты аппроксимирующего полинома;
— во время смены мод данные выдаются на основе аппроксимации по
точкам, полученным до начала процесса реверса;
— после завершения переходных процессов, возникающих при смене мод,
делается более точная аппроксимация с использованием показаний до и после
переключения;
— вычисляется расхождение между этими двумя аппроксимациями, кото-
рое вычитается из полученного в следующем такте значения.
В соответствии с теоремой Котельникова для точного описания анало-
гового процесса дискретным, необходимо, чтобы период дискретизации был
не менее, чем в 10 раз меньше периода самого процесса. Исходя из этого
выбирается период коммутации подставки
Т
, который одновременно явля-
ется и периодом дискретизации. Отметим, что существенное уменьшение
Т
затруднительно, поскольку увеличивает погрешность лазерного гироскопа в
связи с возрастанием динамических зон синхронизации [9–11].
На показания ЗЛГ накладываются шумы — прежде всего дискретизация
выходной информации [12]. Максимальная амплитуда шума за один такт
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 2 19


