














 4 / 14
4 / 14

на конечные элементы приводят не только к известной погрешности
геометрической аппроксимации, но и к обнаруженным погрешностям
контактного алгоритма.
В настоящей статье на основе проведенных многочисленных рас-
четов предложены меры, дающие возможность получать решение рас-
сматриваемого класса задач в программном комплексе ANSYS. Пове-
дение при расчете может коренным образом поменяться при измене-
нии формы поверхностей и тел. Поскольку это изменение проводится
обычно редко, а иногда является нежелательным, такой вариант ис-
ключения ошибок расчета далее не рассматривается.
Постановка задачи.
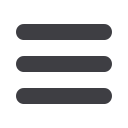
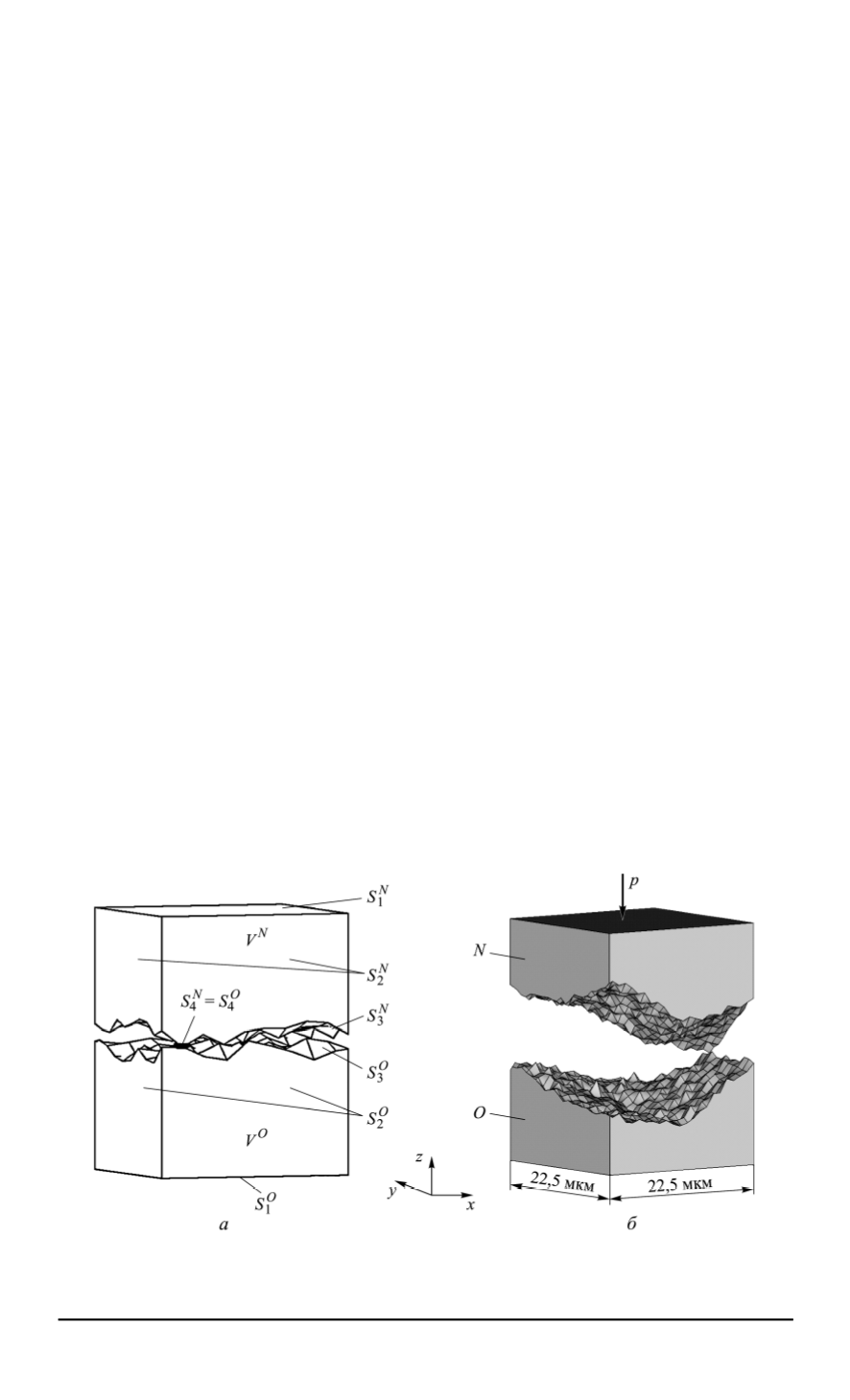
Рассмотрим два контактирующих тела
N
и
O
объемом
V
N
и
V
O
размерами 22,5
×
22,5
×
15 мкм, ограниченные непо-
движными поверхностями
S
N
и
S
O
. Высота тел 15 мкм выбрана на
основе предварительных вычислений так, чтобы на верхней и нижней
поверхностях перемещения были распределены достаточно равномер-
но. Тела имеют гладкие внешние поверхности и неидеальный контакт
неровных поверхностей (рис. 1,
а
).
Обозначим через
S
N
1
,
S
N
2
,
S
N
3
,
S
N
4
части поверхности
S
N
=
=
S
N
1
∪
S
N
2
∪
S
N
3
∪
S
N
4
и
S
O
1
,
S
O
2
,
S
O
3
,
S
O
4
части поверхности
S
O
=
=
S
O
1
∪
S
O
2
∪
S
O
3
∪
S
O
4
.
Последовательно решается квазистационарная задача первоначаль-
ного деформирования области контакта под действием внешнего дав-
ления с числом шагов постепенного приложения нагрузки, равным
576.
На поверхность
S
N
1
тела
N
действует внешнее давление
р
= 8
МПа.
Поверхность
S
O
1
закреплена от перемещений по оси
z
, а поверхности
S
N
2
и
S
O
2
— от перемещений в ортогональных им направлениях. Тре-
нием пренебрегаем.
Рис. 1. Геометрическая схема (
а
) и использовавшаяся в расчете модель контакта
шероховатых тел (
б
)
132 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2016. № 1