














 11 / 15
11 / 15

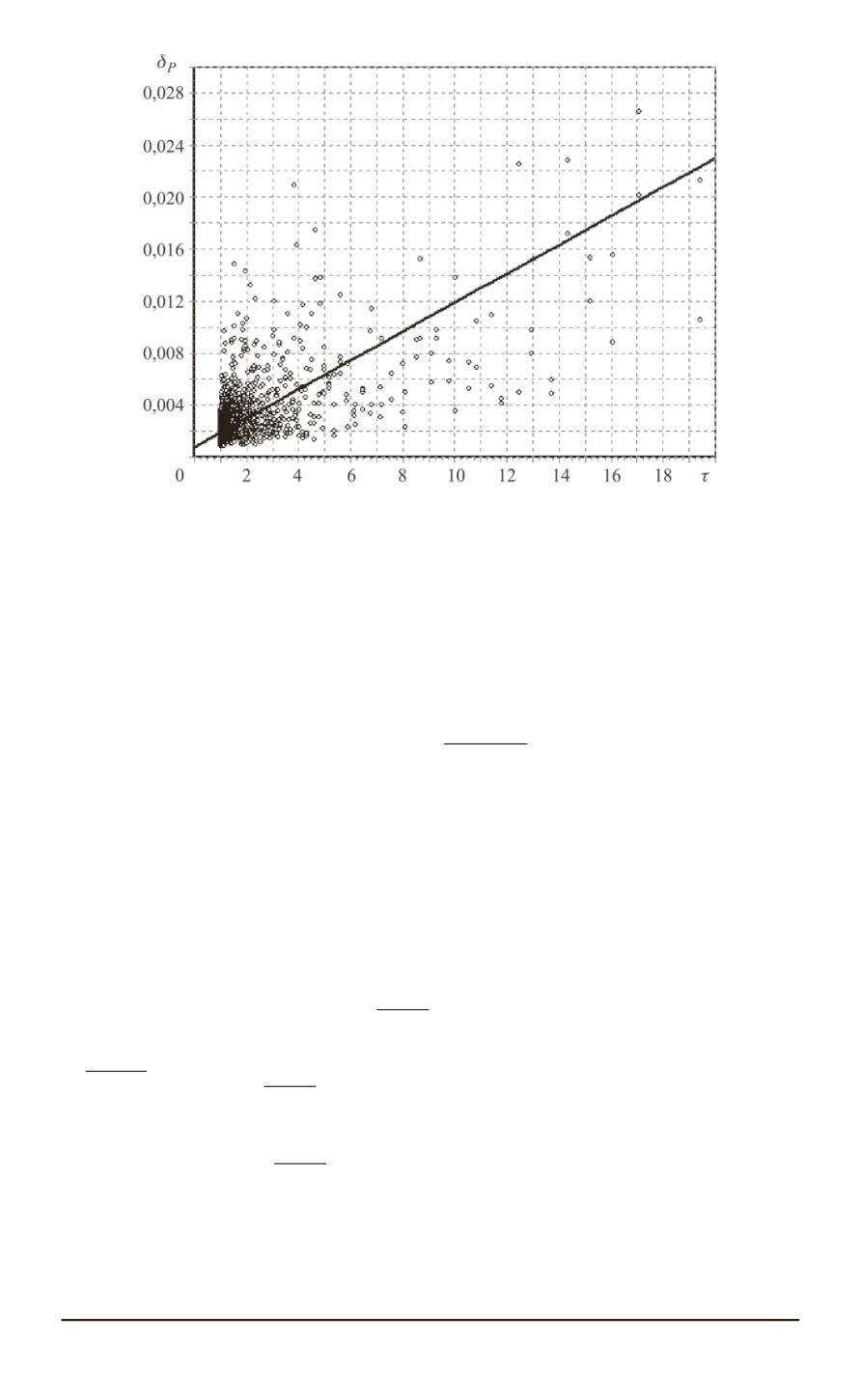
Рис. 6. Экспериментальные значения относительной флуктуации мощности ра-
дионавигационного сигнала
δ
P
в зависимости от относительной длины пути в
атмосфере
τ
= 1
/
cos
α
; прямая линия — линейная аппроксимация эксперимен-
тальных данных
где
θ
i
= Δ
A
i
,
α
i
= Δ
Z
i
— координаты
i
-го отсчета от центра строки.
Нормированная ДН антенны была аппроксимирована гауссоидой с
круговой симметрией
F
(
θ, α
) =
e
−
(
θ
2
+
α
2
)
w
2
,
(23)
где
w
— параметр аппроксимации,
w
= 0
,
6
θ
0
,
5
.
Затем по алгоритму (1) определялась ошибка пеленгации по одной
координате
Δ
θ
a
, обусловленная атмосферными флуктуациями ампли-
туды радионавигационного сигнала. Таким образом, для каждого экс-
периментального кадра данных было получено по два значения угло-
вой ошибки пеленгации
Δ
θ
a
. На рис. 7 представлены значения ошибки
пеленгации по одной координате
Δ
θ
a
в зависимости от относительной
длины пути в атмосфере
τ
=
1
cos
α
.
Видно (см. рис. 7), что среднеквадратическая ошибка пеленгации
p
h
Δ
θ
2
a
i
при
τ
=
1
cos
α
= 1
примерно в 5 раз больше среднеквад-
ратического значения флуктуаций углов прихода радиоволн
σ
ф
(см.
рис. 1), а при
τ
=
1
cos
α
=
5 — примерно в 10 раз. Таким образом,
можно пренебречь влиянием флуктуаций углов прихода радиоволн на
полную ошибку амплитудной пеленгации по одной координате
Δ
θ
.
Следовательно,
Δ
θ
'
Δ
θ
a
.
(24)
76 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2015. № 4