














 3 / 16
3 / 16

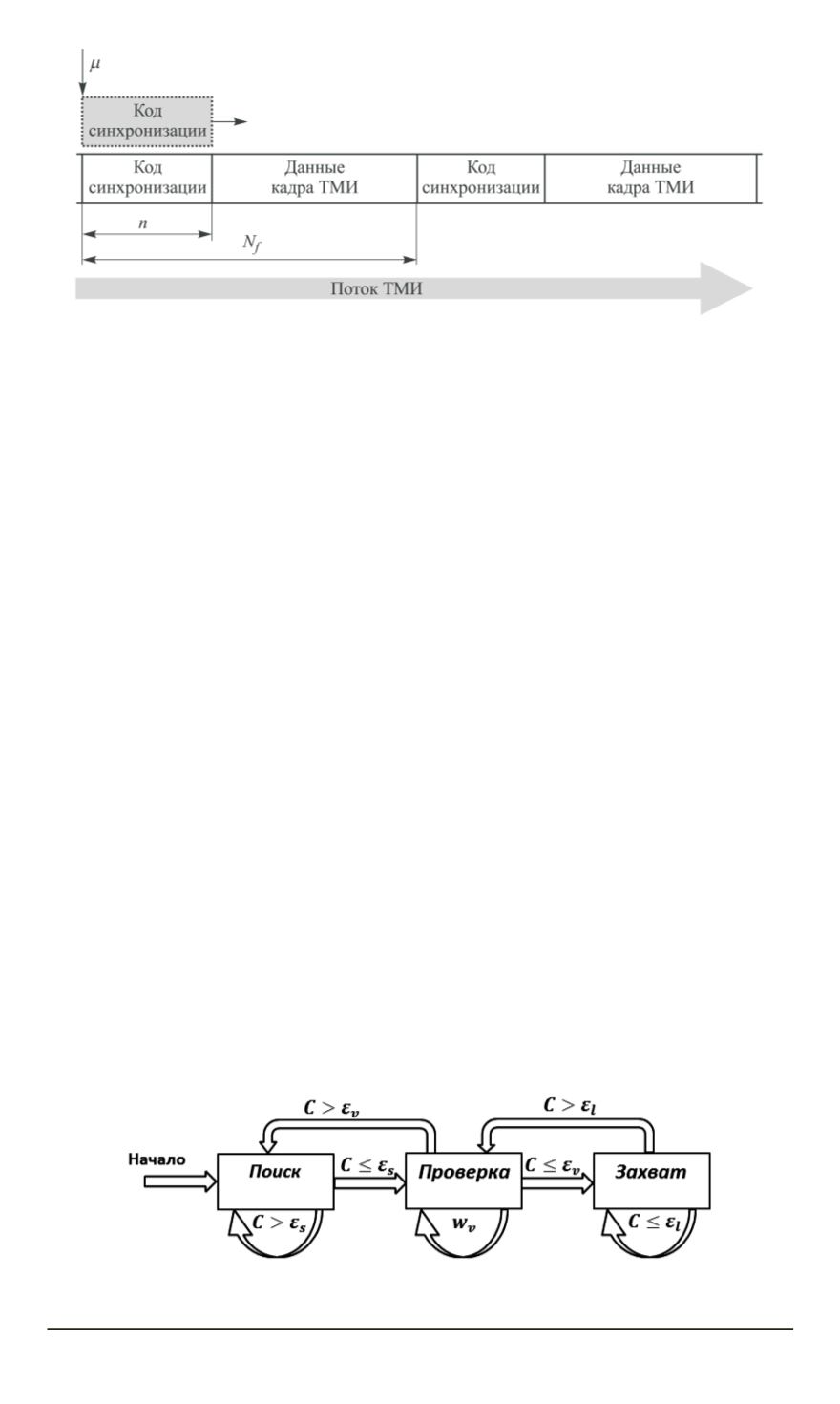
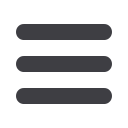
Рис. 1. Структура синхронизируемого кадра ТМИ
где
μ
— местополжение обнаруженного кода синхронизации в бинар-
ном потоке
d
=
{
d
1
, d
2
, d
3
, . . .
}
;
S
=
{
s
1
, s
2
, . . . , s
n
}
— используемый
n
-разрядный код синхронизации;
l
— порядковый номер обнаруженно-
го кадра в потоке
d
;
N
f
— длина кадра ТМИ;
L
(
μ
)
— корреляционный
процесс, приведенный в [5–7], который определяется формулой
L
(
μ
) =
n
X
k
=1
s
k
d
k
+
μ
.
(2)
Значение коэффициента корреляции в каждом состоянии синхро-
низатора непрерывно сравнивается с заданным порогом
ε
для каждого
состояния. Пока это значение не превышает значение порога, син-
хронизатор остается в текущем состоянии, но когда порог превышен,
синхронизатор переходит в предыдущее.
На рис. 2 показаны переходы между состояниями синхронизатора:
“Поиск”, “Проверка” и “Захват”, где
ε
s
— порог синхронизатора в ре-
жиме “Поиск”,
ε
v
— в режиме “Проверка” и
ε
l
— в режиме “Захват”, а
С
представляет собой коэффициент корреляции, который равен вычи-
сленному по формуле (2) значению
L
(
μ
)
. В каждом состоянии, если
значение коэффициента корреляции
С
меньше или равно значению
порога текущего состояния, код синхронизации считается обнаружен-
ным, и наоборот.
В начале работы синхронизатор находится в состоянии “Поиск”.
Если синхронизатор обнаруживает код синхронизации (
C
≤
ε
s
), то
Рис. 2. Переход между состояниями синхронизатора кадров потока ТМИ
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2015. № 2 119