














 12 / 16
12 / 16

m
2
=
{
p
tc
{
m
1
}}
=
{
p
tc
1
(
m
1
{
1
}
)
, p
tc
2
(
m
1
{
2
}
)
, . . . , p
tcl
(
m
1
{
l
}
)
}
,
(16)
где
l
— число элементов
m
1
.
Затем, параметры
(
ε
v
, w
v
)
режима “Проверка” вычисляются по
формуле
(
ε
v
, w
v
) = arg max
p
{
d
p
:
p
tc
(
ε
v
, w
v
)
∈
m
2
, ε
v
> ε
s
}
,
(17)
где
d
p
=
p
tci
−
p
tci
−
1
,
i
= 2
, . . . , l
.
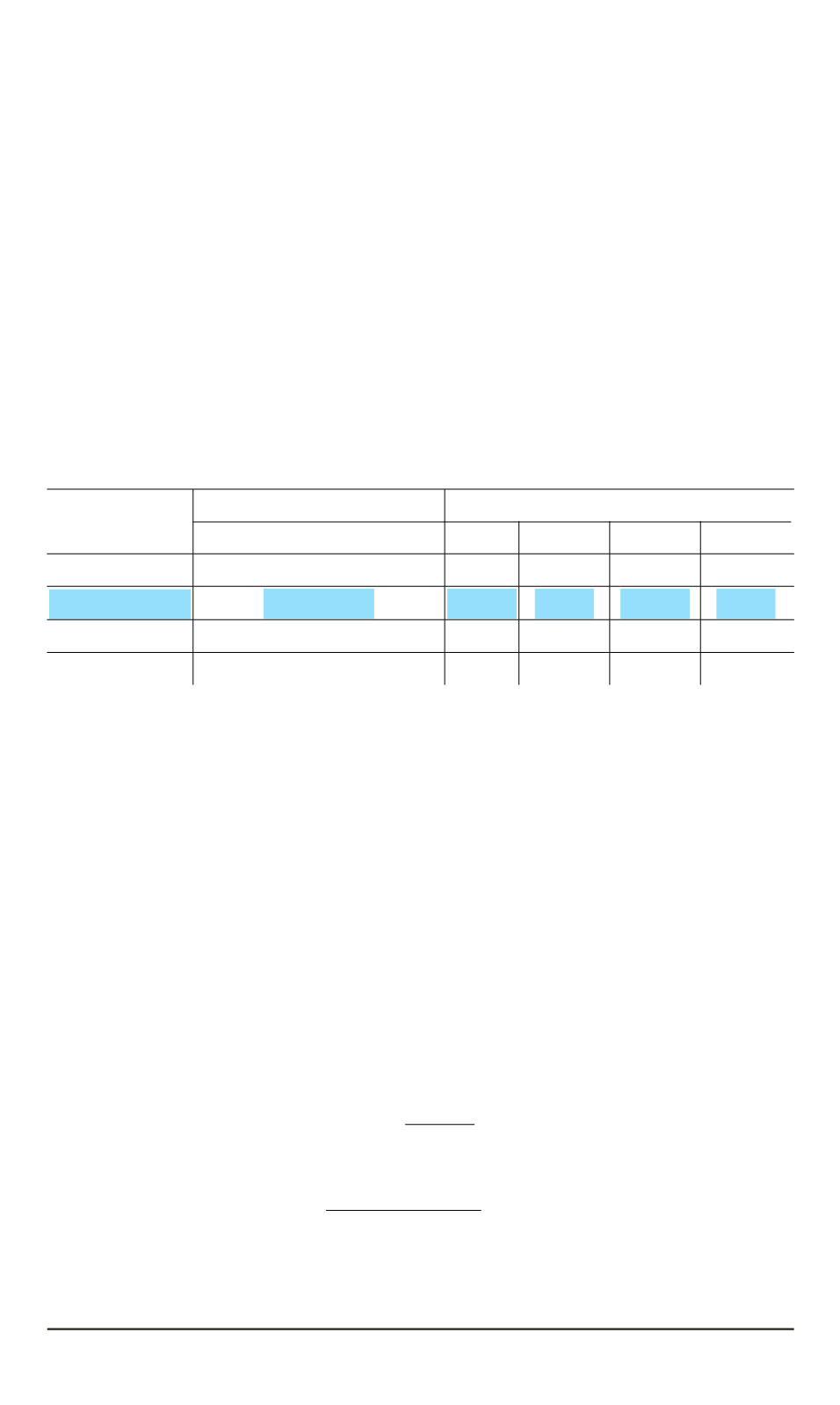
Результаты экспериментов с данными телеизмерений приведе-
ны в табл. 7. Эксперименты выполнены при
p
r
= 0
,
1
, выбранном
значении
ε
s
и для разных значений вероятности пропуска бита
p
d
=
{
0
,
10
−
4
,
10
−
3
,
10
−
2
}
и для различных значений
ε
v
и
w
v
.
Таблица 7
Параметры
ε
v
и
w
v
в состоянии “Проверка”
Параметры
Теоретические значения
p
tc
Экспериментальные значения
p
tc
p
d
= 0
p
d
= 0
p
d
= 10
−
4
p
d
= 10
−
3
p
d
= 10
−
2
ε
v
= 2
, w
v
= 2
0,454762
0,7972 0,7777 0,6613 0,1203
ε
v
= 3
, w
v
= 3
0,60248714
0,9308 0,923 0,7916 0,124
ε
v
= 4
, w
v
= 4
0,68165127
0,9876 0,967 0,8112
—
ε
v
= 5
, w
v
= 5
0,718099482
0,9900 0,9752 0,838
—
Экспериментально полученные значения параметров синхрониза-
тора
(
ε
v
, w
v
)
также совпадают с теоретическими.
Для рассматриваемого случая, в режиме “Проверка” рекомендуется
выбрать значения параметров
ε
v
= 3
и
w
v
= 3
.
Анализ работы синхронизатора в режиме “Захват”.
В состо-
янии “Захват” синхронизатор контролирует только группу длиной
n
символов в позиции, где должен располагаться код синхронизации.
Если число ошибок при проверке кода превышает порог
ε
l
, синхрони-
затор возвращается в состояние “Проверка”.
Оценка работы синхронизатора в режиме “Захват” выполняется по
относительному значению потерь информации
DL
, вызванных сбоями
синхронизации в присутствии шумов. Значение
DL
вычисляется по
формуле
DL
=
L
L
+
K
%
,
(18)
где
L
=
1
/
(1
−
q
) +
w
v
p
tc
+ (
JR
)
(19)
— среднее время, требуемое для правильного обнаружения кода
синхронизации;
128 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2015. № 2