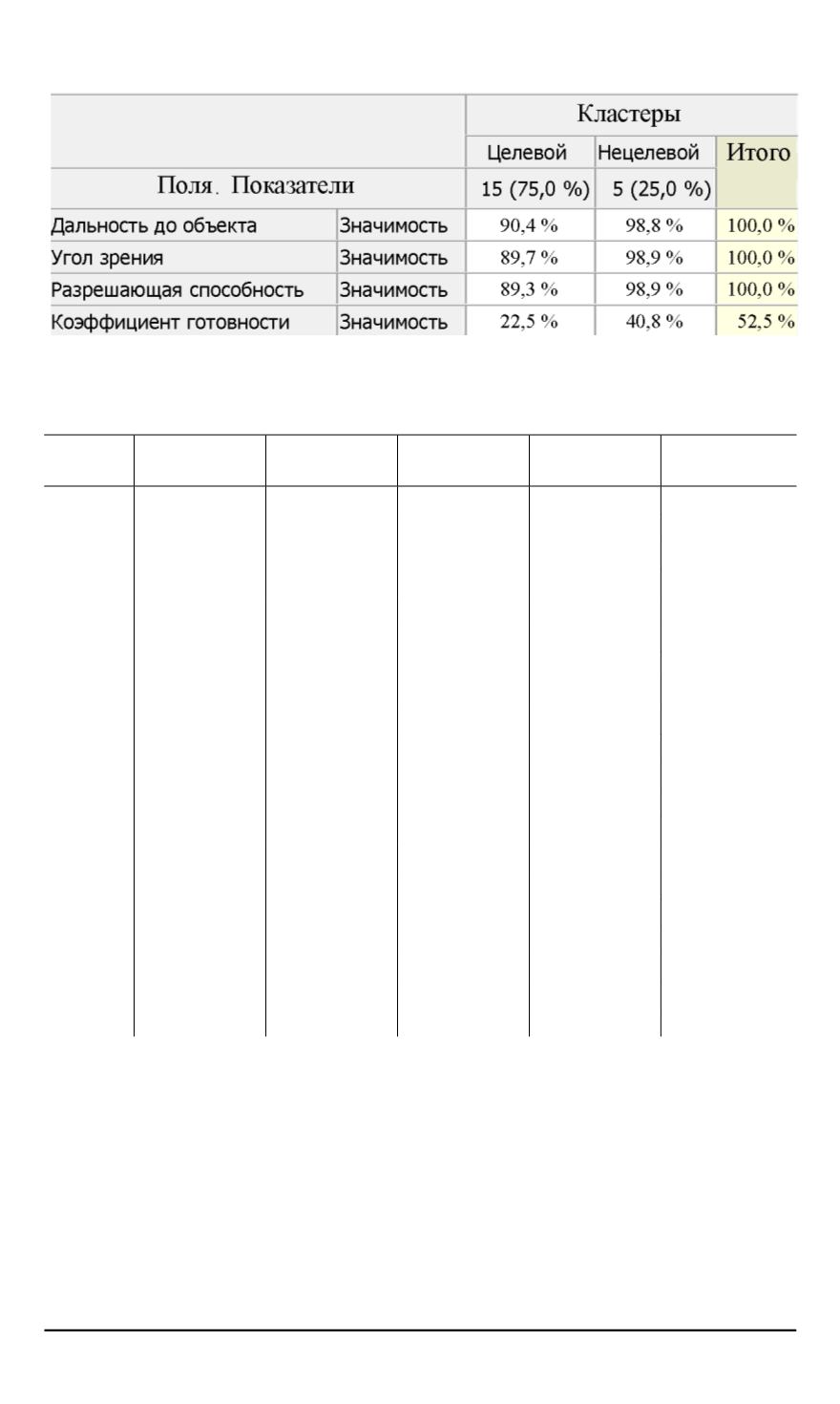
Таблица 4
Возможности решения задачи целевыми и нецелевыми кластерами
Таблица 5
Результаты решения задачи кластеризации
Номер
КА
Дальность
до объекта
Угол зрения Коэффициент
готовности
Разрешающая
способность
Вид кластера
1
1400
0
0,95
50
Целевой
2
1550
10
0,92
62
То же
3
2000
28
0,94
78
>>
5
1679
15
0,85
55
>>
6
1450
3
0,75
50
>>
8
2200
30
0,9
84
>>
9
1965
27
0,95
77
>>
10
1675
13
0,5
63
>>
11
1489
5
0,85
53
>>
12
1590
12
0,73
64
>>
16
1654
14
0,97
55
>>
17
1530
11
0,65
60
>>
18
1765
17
0,73
70
>>
19
1820
18
0,58
80
>>
20
1500
9
0,99
60
>>
4
2500
35
0,95
95
Нецелевой
7
3000
60
0,93
120
То же
13
2789
57
0,48
100
>>
14
4210
85
0,58
150
>>
15
2300
33
0,83
90
>>
Следующим способом управления является способ, основанный на
синергетическом эффекте самоорганизации системы. Сущность спосо-
ба заключается в создании условий для согласованного поведения эле-
ментов ГКНИС с минимальным вмешательством комплекса управле-
ния. В этом случае запрос на выполнение задачи получает один из КА
— датчиков информации, который становится лидером-организатором.
Наличие общей магистрали обмена данными в виде сети КИУ и аль-
манаха системы позволяет разослать заявки по сети с запросами вида:
46 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2011. № 4


