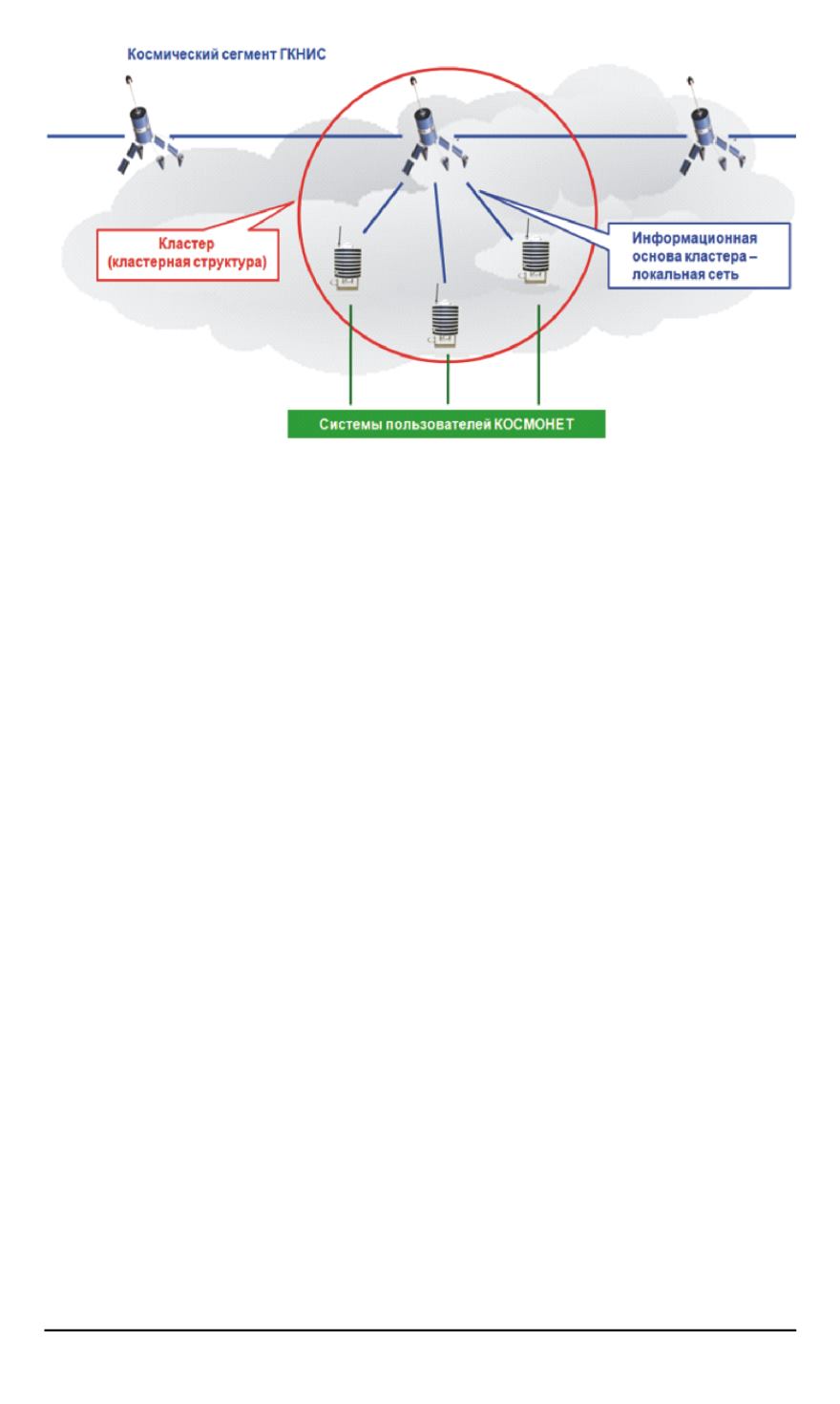
Рис. 2. Кластерная структура системы ГКНИС
цели управления, показателей и критериев эффективности ее дости-
жения.
В нашем случае в качестве объекта управления выступает ГКНИС
как иерархическая многокомпонентная структура, включающая в себя
следующие уровни системы: отдельный КА, КИУ как кластер или вир-
туальный КА, целевые подсистемы, общесистемный уровень. Вслед-
ствие этого совокупность способов управления должна состоять из
способов для каждого уровня.
Представляется, что управление отдельными КА будет происхо-
дить путем реализации технологического цикла управления (ТЦУ).
Структура ТЦУ включает в себя последовательное решение задач
командно-программного (КПО), информационно-телеметрического
(ИТО), навигационно-баллистического (НБО) и частотно-временн ´ого
обеспечения (ЧВО).
Реализация ТЦУ состоит из следующих операций: закладка рабо-
чих и временных программ (РП и ВП) на борт КА; измерение текущих
навигационных параметров (ИТНП) КА средствами наземного ком-
плекса управления (НКУ); съем информации обобщенного контроля
(ИОК) с КА по радиолинии командно-измерительных систем (КИС);
проведение сверки бортовой и единой шкал времени; съем телеметри-
ческой информации (ТМИ), а также других операций, определяемых
спецификой управляемого КА.
При этом часть задач КПО, связанная с планированием работы ор-
битальных средств, осуществляется заблаговременно в пунктах упра-
вления НКУ. Задачи КПО, ИТО, НБО и ЧВО являются достаточно
хорошо отработанными при управлении КА, а в ряде случаев, напри-
мер, для ГЛОНАСС, и для группового объекта.
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2011. № 4 39


