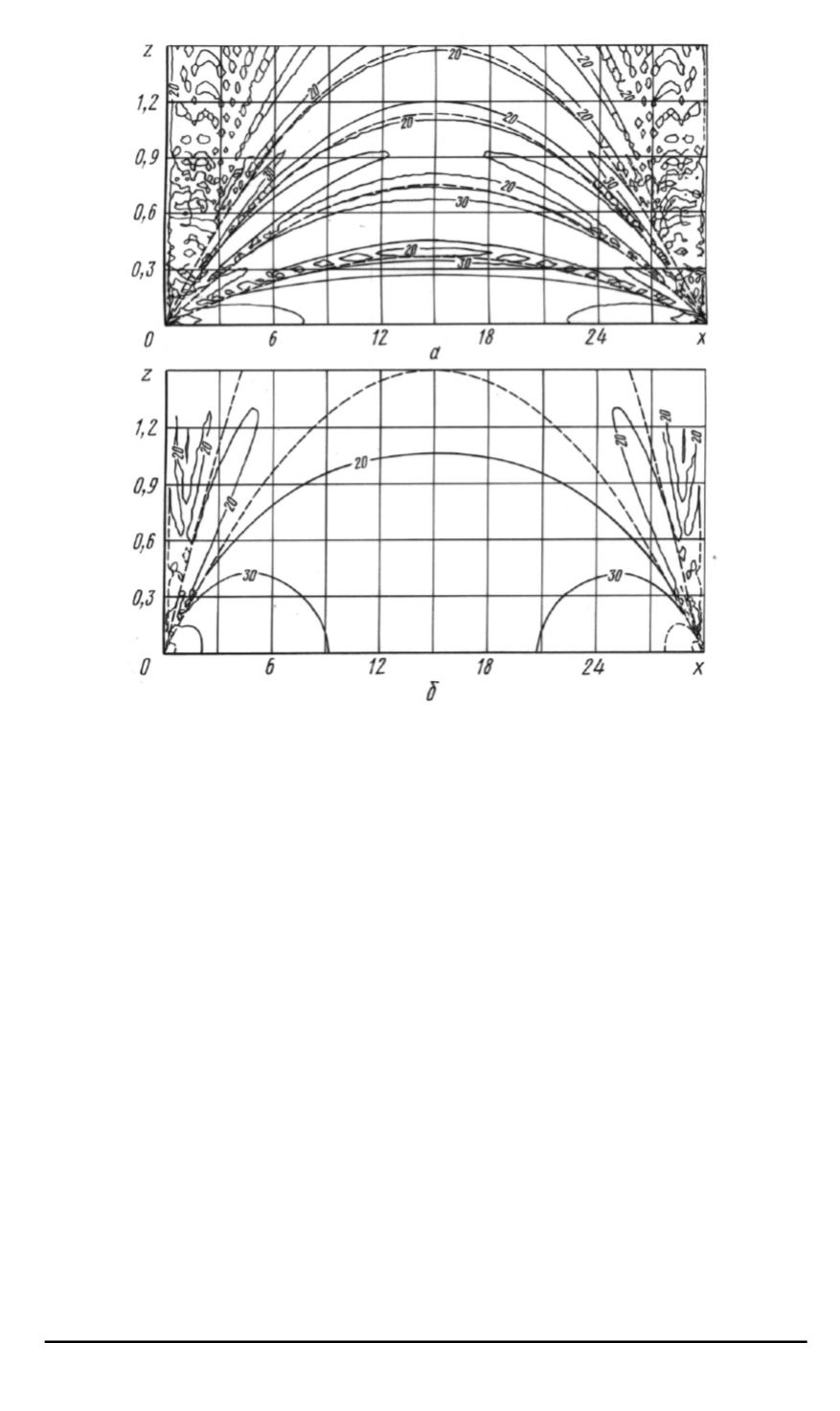
Рис
. 2.
Зона обнаружения воздушных объектов типа
“
самолет
” (
а
)
и
“
крылатая
ракета
” (
б
)
в вертикальной плоскости
с использованием для каждого строба уравнения ФРЛ
(4).
Аналогич
-
ные зоны для тех же объектов
,
что и на рис
. 2,
представлены на рис
. 3.
Видно
,
что лепестковый характер зоны ФРЛС при этом действительно
пропадает
,
происходит ее расширение
,
а потолок зоны увеличивается
по мере приближения к точке стояния ФРЛС
.
Измерение дальности
,
как и разрешение целей по дальности при
одинаковом их азимуте
,
в ФРЛС КО представляет собой новую задачу
.
Возможный путь ее решения следующий
.
Весь интервал дальностей
разбивается на
N
стробов
,
и в каждом стробе производится доплеров
-
ская обработка
,
идентичная описанной выше
.
Результаты обработки на
выходах
N
режекторных фильтров во временн
´
ой области
,
отнесенные
к одному и тому же азимуту
,
выстраиваются в зависимость выходного
эффекта
(
амплитуды
,
мощности
,
факта обнаружения
)
от номера строба
1
6
n
6
N
или дальности
R
n
=
ncτ
и
/
2
.
При наличии единственной це
-
ли на данном азимуте на дальности
R
ц
факт обнаружения будет иметь
место в стробах с номерами
n > n
ц
,
где
n
ц
= [2
R
ц
/
(
cτ
и
)]
(
[
x
]
—
целая
80 ISSN 0236-3933.
Вестник МГТУ им
.
Н
.
Э
.
Баумана
.
Сер
. "
Приборостроение
". 2004.
№
4


