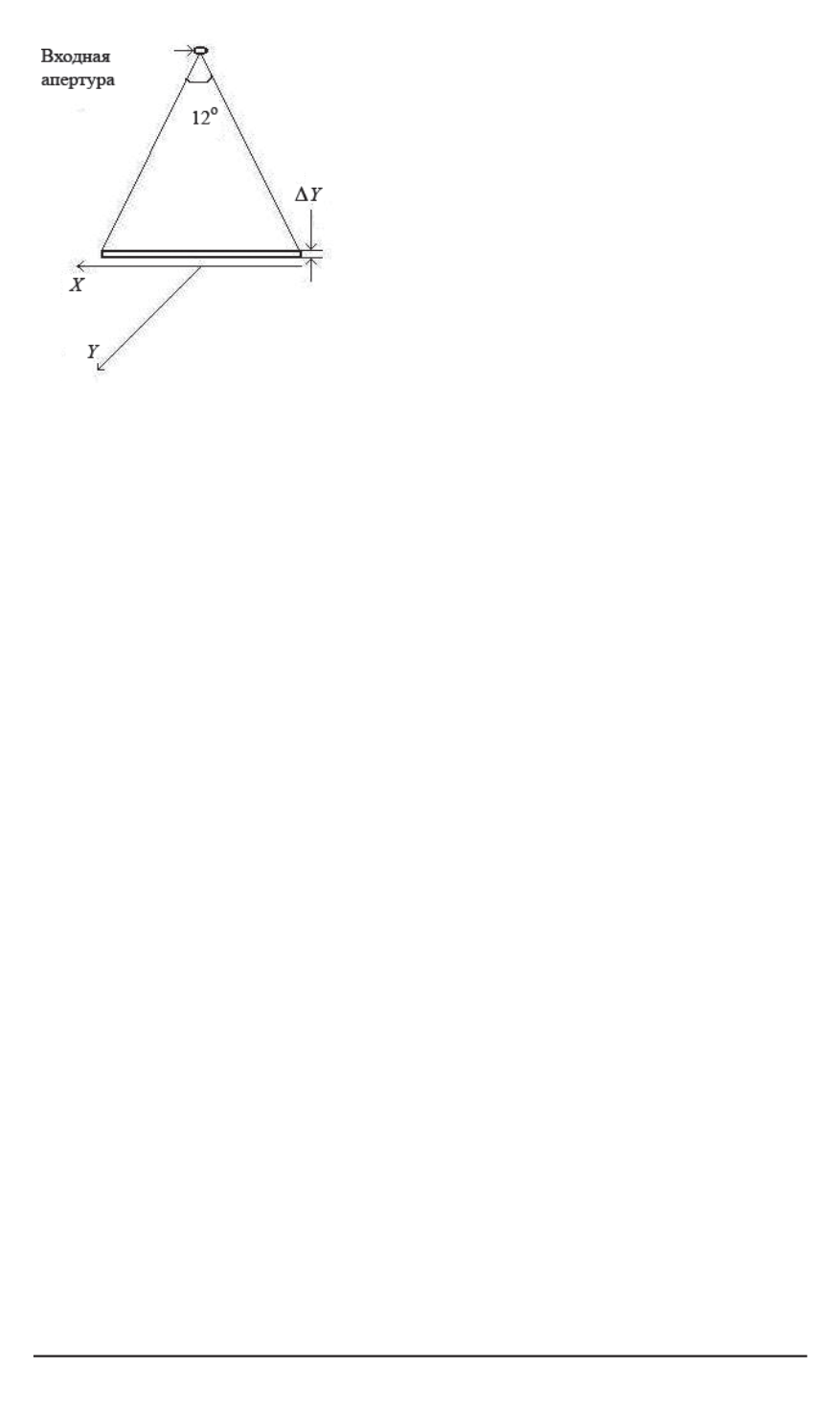
Рис. 2. Полоска поверхности
Земли, проецируемая на вход
фотоприемного устройства. Ве-
личина полоски по
Y
определя-
ется углом
1
и высотой полета
отклонения спектральной линии пропор-
ционален длине волны, что позволяет
разворачивать плоский поток в зависи-
мости от длины волны по угловой коор-
динате.
Оптическая система и дифракцион-
ная решетка формируют на фотоприем-
ной матрице изображение, по одной оси
которого отложена
x
координата узкой
полоски Земли (см. рис. 2), по другой
λ
— длина волны отражаемого от Зем-
ли излучения, а величина напряжения на
выходе усилителя каждого элемента ма-
трицы (пикселя) прямо пропорциональ-
на спектральной плотности излучения на
данной длине волны. Таким образом, на
фотоприемной матрице получается на-
бор спектральныхзависимостей отраженного от поверхности Земли
излучения в зависимости от координаты
x
определенного участка по-
верхности Земли. Вследствие того, что самолет (или вертолет, а в буду-
щем и космический аппарат), на котором находится гиперспектрометр,
движется вдоль координаты
y
(см. рис. 2), то происходит своего рода
сканирование поверхности Земли в направлении
Y
.
Первичная обработка изображения.
В качестве фотоприемно-
го устройства используется матрица активныхпикселей IBIS-5. Для
управления матрицей, организации съема и сохранения цифровых ви-
деоданныхприменена программируемая логическая интегральная схе-
ма (ПЛИС) Virtex2Pro со встроенным процессором PowerPC. Сохра-
няются видеоданные на жестком диске с интерфейсом IDE, емкостью
400 Гб.
На рис. 3 показан один кадр видеоизображения летного экспери-
мента, поступающего непосредственно с одного из модулей прибора
для канала второго видимого излучения (
λ
∼
0
,
66
. . .
0
,
86
мкм). Фак-
тически на кадре по оси абсцисс отложена длина волны
λ
, а по оси
ординат — координата
x
участка Земли.
Из-за аппаратныхособенностей гиперспектрометра (оптической
части прибора, конструкции фотоприемного устройства) при обра-
ботке данныхиспользуется не весь видеокадр с каждого модуля, а
некоторая его рабочая область (показана белой рамкой на рис. 3). В
результате при разрешении фотоприемной матрицы
1280
×
1024
пик-
селей получаемое эффективное разрешение рабочей области оказыва-
ется порядка
500
×
500
. На рисунке хорошо видны линии поглощения
14 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 3


