Принцип построения системы.
Для перестройки системы в соот-
ветствии с целевой функцией необходимо использовать статистиче-
ские характеристики какого-нибудь ее параметра с постоянным
N
рег
,
которые давали бы информацию о текущем ОСШ на входе. При фикси-
рованных
N
рег
и
F
и известном ОСШ можно определить, как должна
работать система: уменьшать или увеличивать
N
рег
.
Рассмотрим поведение УУ схемы.
При большом ОСШ на входе помехи практически не влияют на
входной сигнал и накопитель будет принимать отсчеты одного зна-
ка, соответствующие текущему фазовому рассогласованию, поэтому
сумма накопленных отсчетов не меняет своего знака.
Если же на сигнал воздействует шум, то возможен неправильный
отсчет, т.е. противоположный по знакутому, который соответствует те-
кущемуфазовомурассогласованию. Тогда сумма накопленных отсче-
тов уже не будет монотонно стремится к пределу
N
рег
или
(
−
N
рег
)
,
а будут возникать флуктуации в обратном направлении, вызванные
шумом, которые при малом
N
рег
даже могут с достаточно большой
вероятностью привести к неправильномурегулированию. В пределе,
когда ОСШ
→
0
, вероятности взятия как положительного, так и отри-
цательного отсчетов равны и до регулирования полярность отсчетов
много раз меняется.
В итоге получается, что число перемен полярности во взятых от-
счетах зависит от
q
и
N
рег
.
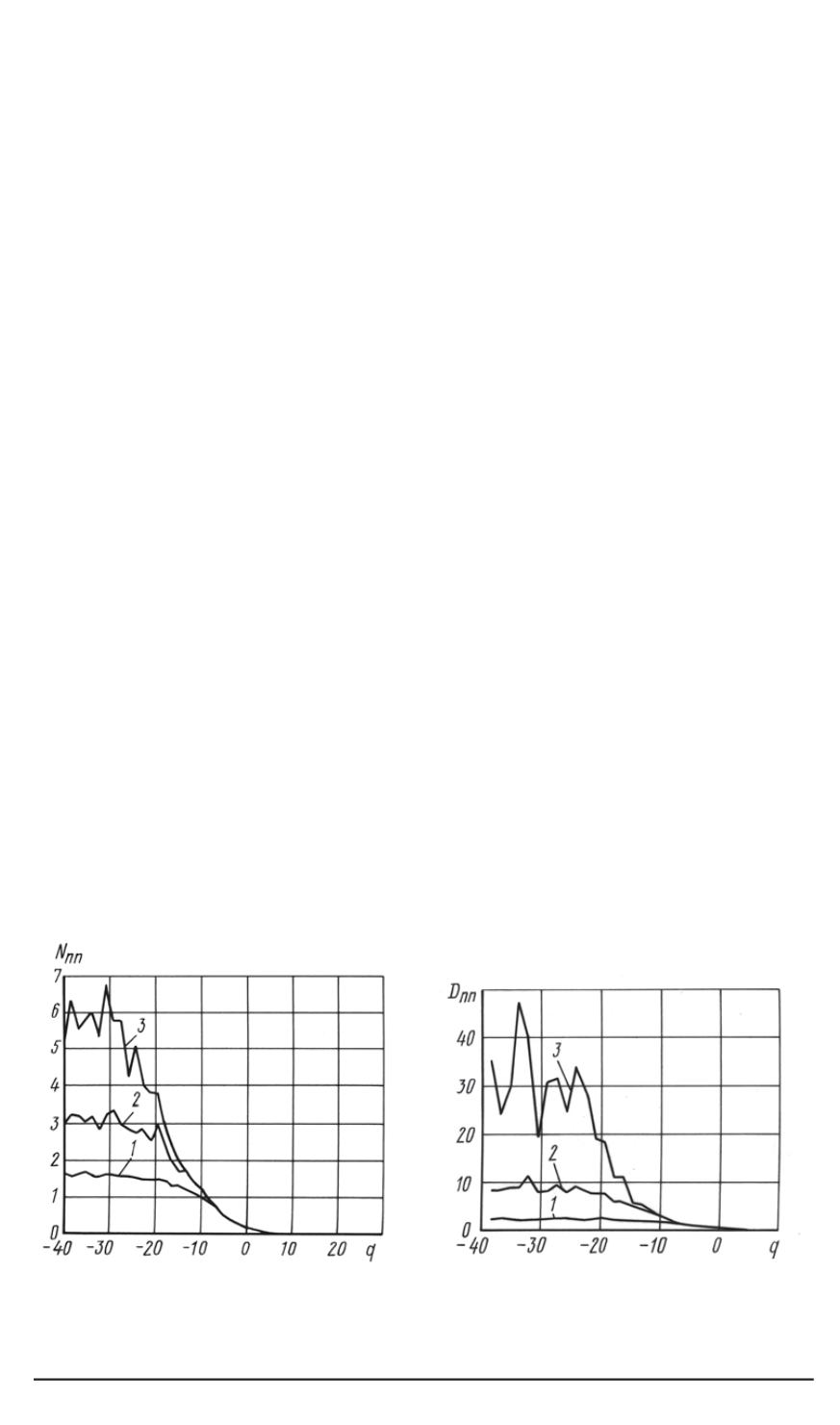
На рис. 4 показана зависимость среднего числа перемен полярно-
сти во взятых отсчетах
N
пп
за время
T
рег
(пока не произойдет регули-
рование) от ОСШ при
N
рег
= 4
,
8
и
16
.
На рис. 5 приведена зависимость средней дисперсии
D
пп
числа
перемен полярности
N
пп
от ОСШ при
N
рег
= 4
,
8
и
16
.
Рис. 4. Зависимость
N
пп
за время
T
рег
от
q
при
N
рег
= 4
,
8
и 16 (кри-
вые
1
,
2
и
3
соответственно)
Рис. 5. Зависимость
D
пп
от
q
при
N
рег
= 4
,
8
и 16 (кривые
1
,
2
и
3
со-
ответственно)
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 1 51


