














 3 / 10
3 / 10

В.А. Бойков, В.Я. Колючкин
6
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2017. № 5
Предполагается, что первичный захват изображения объекта осуществляется
либо методом байесовской сегментации [1, 3], либо на основе детектирования
движения изображения [1, 2, 4], либо путем целеуказания изображения в поле
кадра человеком-оператором.
Предварительный анализ изображения.
Цель этапа — локализация области
наиболее вероятного положения изображения объекта в поле кадра для после-
дующего детального анализа этой области.
Алгоритм предварительного анализа изображения практически полностью
повторяет алгоритм на основе
RFM
, описанный в работе [8]. На основе априор-
ных данных о предполагаемых размерах и координатах изображения объекта в
поле кадра выделяется область предварительного анализа (ОПА). Координаты
центра ОПА задаются равными координатам центра строба в виде прямоуголь-
ника, ограничивающего предполагаемое изображение объекта. Размеры ОПА
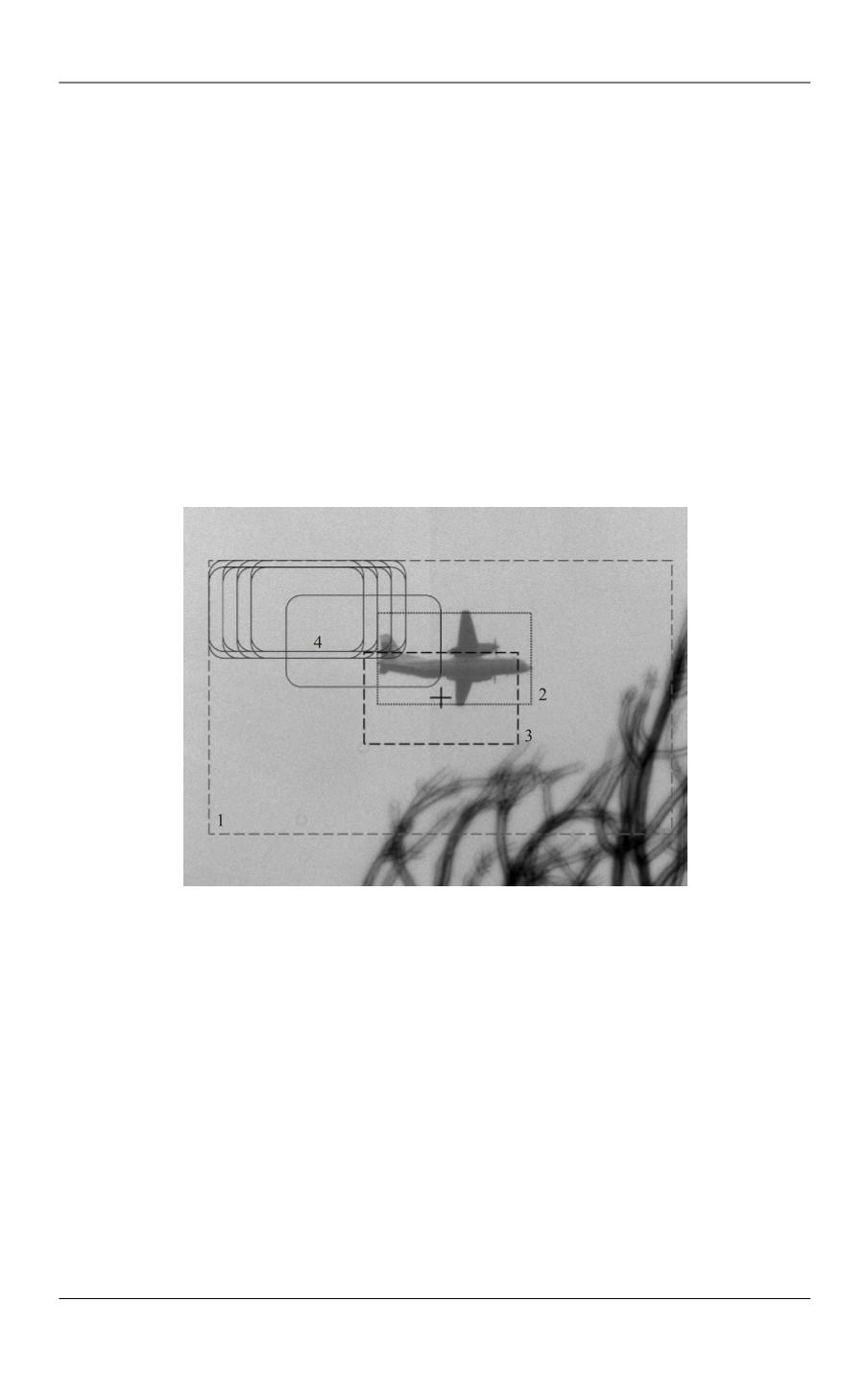
задаются равными утроенным размерам этого прямоугольника (рис. 1).
Рис. 1.
Иллюстрация процесса предварительного анализа:
1 — область предварительного анализа; 2 — область изображения объекта; 3 — область предпола-
гаемого местонахождения изображения объекта; 4 — область анализируемых фрагментов; + —
центр области 3
В пределах ОПА формируется сетка предварительного анализа (СПА),
представляющая собой набор фрагментов кадра, которые впоследствии оцени-
ваются на схожесть с изображением объекта. Размеры фрагментов СПА совпа-
дают с размерами прямоугольника, ограничивающего предполагаемое изобра-
жение объекта. Шаг СПА по горизонтали и вертикали принимается равным 5 %
ширины и высоты того же прямоугольника.
Классификация фрагментов СПА проведена согласно алгоритму классифи-
кации фрагментов, описанному в работе [8], с некоторыми отличиями. В целях
уменьшения погрешности определения габаритных размеров и координат чис-