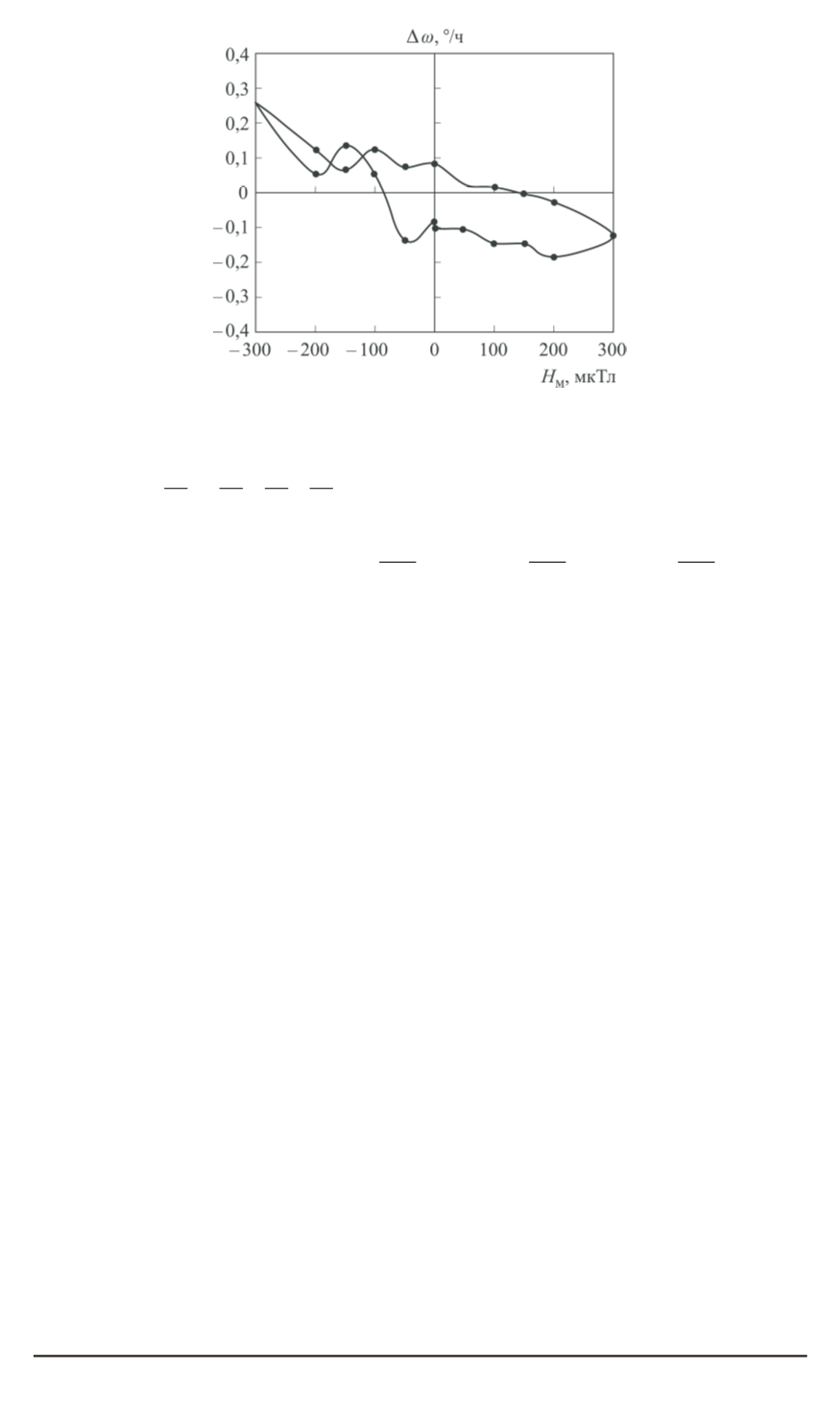
Рис. 2. Зависимость
Δ
ω
(
H
м
)
при действии магнитного поля вдоль оси
OZ
Модель погрешностей ВОГ при наличии магнитного поля с напря-
женностью
H
м
H
x
, H
y
, H
z
запишем в виде
Δ
ω
(
H
м
) =
ω
0
+
ω
x
(
H
x
)
H
x
H
E
+
ω
y
(
H
y
)
H
y
H
E
+
ω
z
(
H
z
)
H
z
H
E
,
где
ω
0
— составляющая скорости дрейфа, не зависящая от магнитного
поля;
H
x
,
H
y
,
H
z
— проекции вектора напряженности магнитного поля
H
м
на оси
ОХ
,
О
Y
и
OZ
прибора;
H
E
= 100
мкТл — нормирующий
множитель, близкий к значению напряженности магнитного поля Зем-
ли;
ω
x
,
ω
y
,
ω
z
— коэффициенты влияния магнитного поля на скорость
дрейфа ВОГ (удельная составляющая скорости дрейфа).
Значения коэффициентов влияния магнитного поля на скорость
дрейфа ВОГ,
◦
/ч, при испытании 1 (числитель) и 2 (знаменатель)
Прибор:
ω
x
ω
y
ω
z
1
– 0,015/0,009 – 0,008/0,006 – 0,055/– 0,041
2
– 0,037/– 0,043 – 0,576/– 0,375 – 0,253/– 0,145
Результаты эксперимента показывают значительное влияние маг-
нитного поля на погрешность ВОГ (для образцов до 0,6
◦
/(ч
∙
100 мкТл)).
Определение составляющих модели погрешностей ВОГ при воз-
действии тепловых и магнитных полей позволяет создать методику
алгоритмической компенсации погрешностей ВОГ в процессе эксплу-
атации на основе информации, получаемой от термодатчиков и маг-
нитометров.
ЛИТЕРАТУРА
1.
Гироскопические
системы / под ред. Д.С. Пельпора. Ч. 3. М.: Высш. шк., 1991.
382 с.
78 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 3


