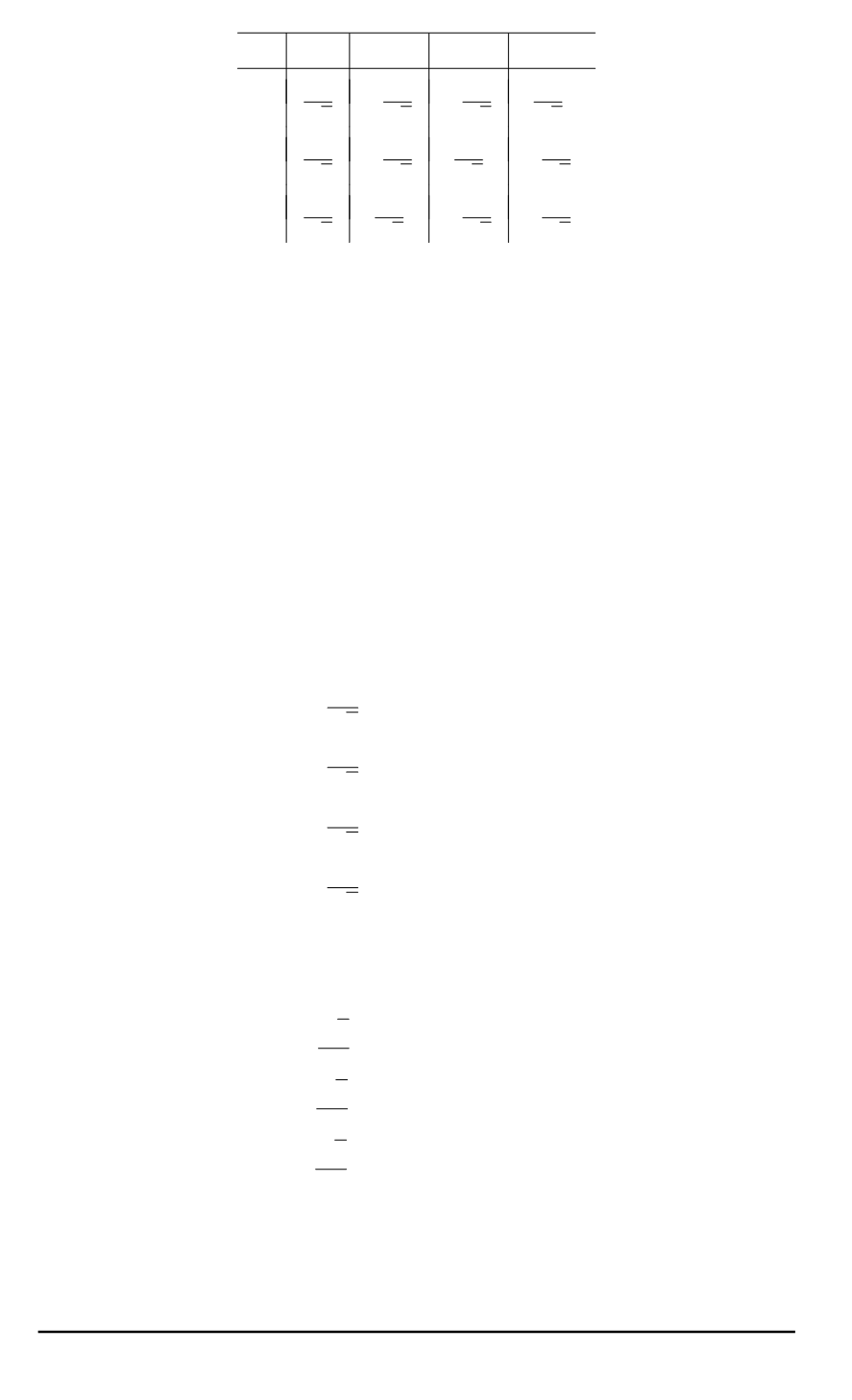
¯
a
¯
b
¯
c
¯
d
X
1
√
3
−
1
√
3
−
1
√
3
1
√
3
Y
1
√
3
−
1
√
3
1
√
3
−
1
√
3
Z
1
√
3
1
√
3
−
1
√
3
−
1
√
3
Заметим
,
что при этом векторы
¯
a,
¯
b,
¯
c,
¯
d
направлены к вершинам правиль
-
ного тетраэдра
.
Орты
¯
a,
¯
b,
¯
c,
¯
d
направлены под равными углами друг к другу
,
так как
¯
a
¯
b
= ¯
a
¯
c
= ¯
a
¯
d
= ¯
b
¯
c
= ¯
b
¯
d
= ¯
c
¯
d
=
−
1
/
3
.
Угол между любой парой
ортов равен
β
= arccos
µ
−
1
/
3
¶
= 109
◦
28
0
16
,
3
00
.
Каждый орт образует с ося
-
ми системы координат
,
составляющими октант
,
в котором расположен дан
-
ный орт
,
равные углы
β/
2 = 54
◦
44
0
8
,
2
00
.
Предлагаемая ориентация измери
-
тельных осей ЧЭ обеспечивает помимо компактности конструкции прибора
простоту преобразования выходных показаний ЧЭ в три компоненты векто
-
ра ускорения
,
определяемые по дифференциальным частотным выходам при
минимальном числе ЧЭ
[2].
Действительно
,
проекции ускорения
¯
W
= (
W
X
, W
Y
, W
Z
)
на направле
-
ния ортов
¯
a,
¯
b,
¯
c,
¯
d
,
совпадающие с измерительными осями ЧЭ
,
определяют
-
ся
,
соответственно
,
соотношениями
W
1
=
1
√
3
(
W
X
+
W
Y
+
W
Z
)
,
W
2
=
1
√
3
(
−
W
X
−
W
Y
+
W
Z
)
,
W
3
=
1
√
3
(
−
W
X
+
W
Y
−
W
Z
)
,
W
4
=
1
√
3
(
W
X
−
W
Y
−
W
Z
)
.
(1)
Тогда проекции вектора ускорения
¯
W
на оси
X, Y, Z
определяются следу
-
ющим образом
:
W
X
=
√
3
4
(
W
1
−
W
2
−
W
3
+
W
4
)
,
W
Y
=
√
3
4
(
W
1
−
W
2
+
W
3
−
W
4
)
,
W
Z
=
√
3
4
(
W
1
+
W
2
−
W
3
−
W
4
)
.
(2)
При этом
W
1
+
W
2
+
W
3
+
W
4
= 0
.
(3)
ISSN 0236-3933.
Вестник МГТУ им
.
Н
.
Э
.
Баумана
.
Сер
. “
Приборостроение
”. 2003.
№
4 123


