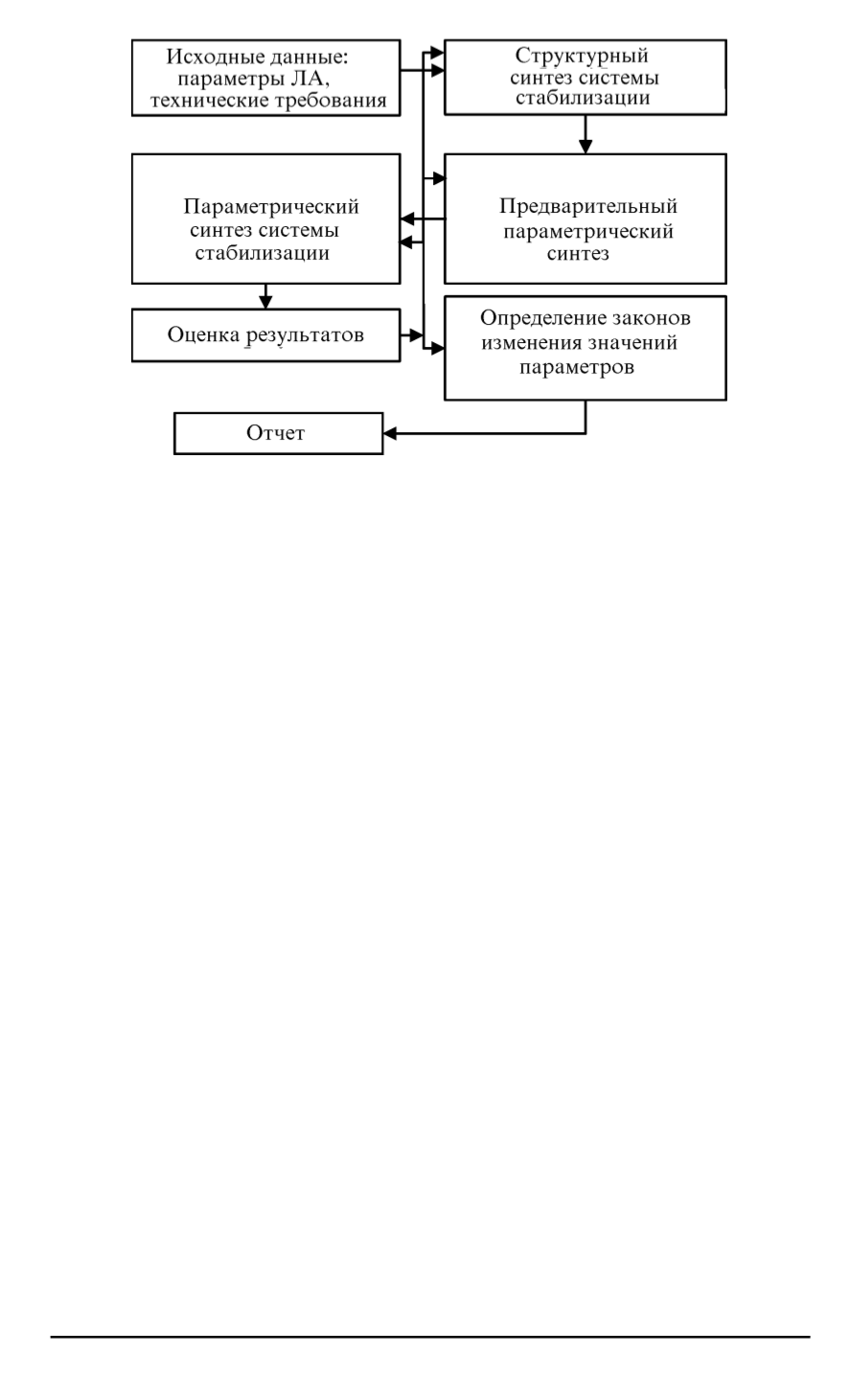
Рис
. 1.
Основные этапы решения задачи синтеза системы стабилизации ЛА
мические характеристики
,
передаточные функции и частотные харак
-
теристики для любого режима полета
;
—
находить в области полета ЛА зоны постоянных настроек авто
-
пилота
,
при которых удовлетворяются предъявляемые к системе стаби
-
лизации технические требования
;
—
использовать различные алгоритмы параметрической оптимиза
-
ции как для отдельных контуров системы стабилизации
,
так и для всей
системы
;
—
получать законы изменения настроек автопилота в зависимости
от режима полета ЛА в классе кусочно линейных регуляторов
;
—
исследовать поведение системы стабилизации при различных
условиях полета ЛА
.
При работе с пакетом АРСС пользователь после ввода исходных
данных проводит структурный синтез системы стабилизации
,
заключа
-
ющийся в выборе расчетной структурной схемы на основе набора ти
-
повых схем
.
Выбор расчетной структурной схемы определяется ди
-
намикой ЛА
,
методом наведения
,
задачами системы стабилизации
,
предъявляемыми к системе техническими требованиями
,
технически
-
ми возможностями и поддерживается справочной информацией
,
пре
-
доставляемой программой
.
На следующем этапе работы проводится предварительный параме
-
трический синтез системы стабилизации
,
основная цель которого
—
выбор динамических характеристик рулевого привода
.
Для этого ис
-
пользуется метод стандартных коэффициентов с учетом ряда ограни
-
чений
,
характерных для конкретных типов рулевых приводов
.
110 ISSN 0236-3933.
Вестник МГТУ им
.
Н
.
Э
.
Баумана
.
Сер
. “
Приборостроение
”. 2003.
№
3


