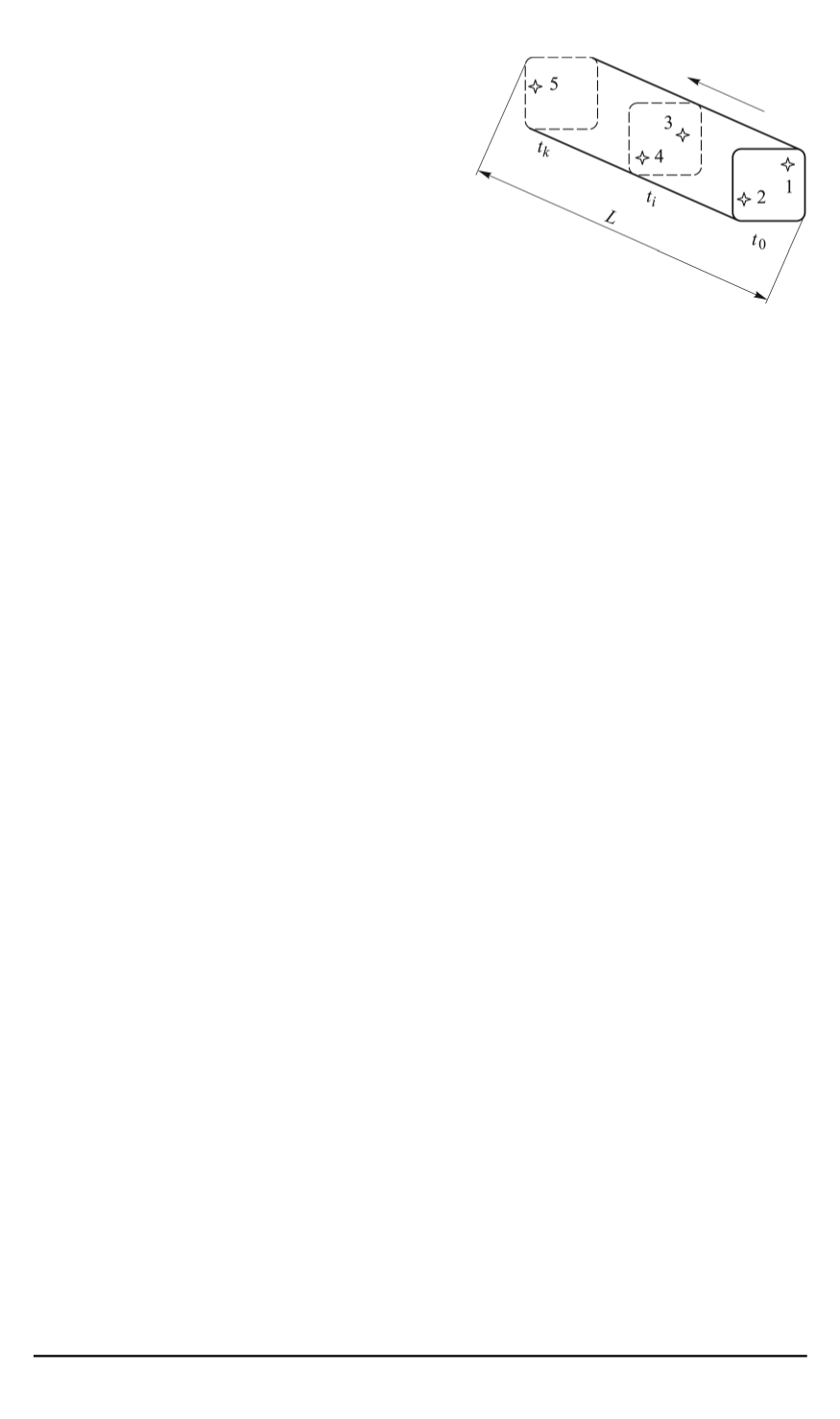
Рис. 2. Иллюстрация метода повышения
вероятности распознавания звезд с по-
мощью информации об угловой скоро-
сти:
t
0
— первый кадр визирования ярких звезд
с малым временем накопления;
t
i
— проме-
жуточный кадр визирования;
t
k
— послед-
ний кадр визирования;
L
— длина траекто-
рии (пропорциональна угловой скорости);
стрелкой показано направление движения
поля зрения по небесной сфере; 1–5 — но-
мера звезд
На момент времени визирования первого кадра в поле зрения на-
ходится всего две потенциальные звезды, на момент времени визиро-
вания последнего кадра — только одна звезда 5, при этом координаты
звезд 1–4 рассчитываются интегрированием угловой скорости с ДУС.
Учитывая, что погрешности ДУС имеют временн ´ой характер, погреш-
ности определения координат звезд 1 и 2 будут выше, чем звезд 3, 4 и
тем более 5.
Теоретически угловую скорость можно получить от ДУС КА, од-
нако этот подход не оптимален ввиду сложности организации обмена
данными между системой управления КА и автономным ЗД (который
работает как оконечное устройство).
Указанную задачу предложено решить путем встраивания в кон-
струкцию звездного датчика МЭМС ДУС, являющегося компактным и
малопотребляющим прибором, поэтому существенного “утяжеления”
конструкции ЗД не ожидается. Как будет показано далее, для примене-
ния рассмотренного метода не требуется очень точного определения
угловой скорости (что может обеспечиваться только прецизиоными
ДУС).
Вопросы поиска, селекции и слежения за световыми источниками,
регистрируемыми на ФПМ, известны [2], поэтому их рассматривать
не будем. Подробнее остановимся на слежении за источниками по
показаниям МЭМС ДУС. Для пересчета координат источников в при-
борной системе координат (ПСК) на необходимый момент времени
используем следующую формулу:
~s
0
i
=
q
∙
~s
i
∙
q ,
где
~s
0
i
— вектор направляющих косинусов
i
-й звезды в ПСК на задан-
ный момент времени в виде кватерниона;
~s
i
= (0
, s
xi
, s
yi
, s
zi
)
;
q
— ква-
тернион, характеризующий поворот ПСК в инерциальном простран-
стве от момента времени визирования звезды до заданного момента
времени;
q
– соответствующий сопряженный кватернион.
Для расчета кватерниона, характеризующего изменение ориента-
ции, путем интегрирования показаний ДУС (угловой скорости) приме-
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 1 37


