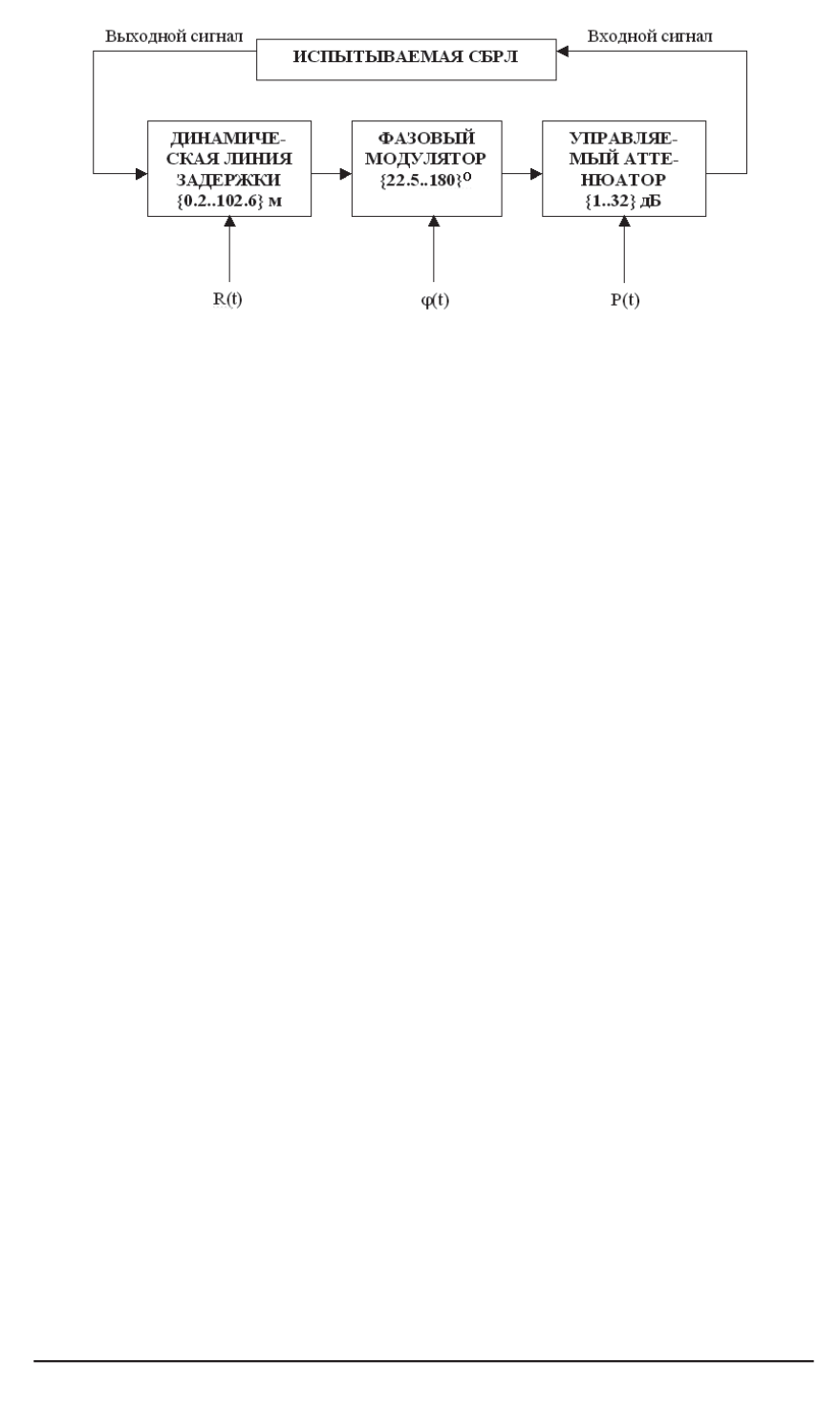
Рис. 3. Обобщенная схема построения канала имитации входного сигнала СБРЛ
Вычислительные средства АКПНМ связаны с каналами имитации
и испытываемой СБРЛ с помощью устройств сопряжения, в качестве
которого могут быть использованы входные и выходные регистры,
ЦАП и АЦП, ключи, устройства прерывания и т. п. Общие задачи
инициализации, управления и сбора информации решаются централь-
ной ЭВМ.
Канал имитации входного сигнала АКПНМ (рис. 3) предназначен
для моделирования высокочастотного сигнала СБРЛ, отраженного от
цели или подстилающей поверхности, в том числе воспроизведения
изменения времени задержки, амплитуды и доплеровского сдвига ча-
стоты сигнала в лабораторных условиях. Управление каналом имита-
ции производится от устройствауправления.
Процесс отражения сигналапри движении изделия натраектории
моделируется путем пропускания излучаемого сигнала СБРЛ через
последовательно включенные: волноводно-кабельную линию задерж-
ки (УЛЗ), управляемую по длине и управляемые аттенюатор и фазо-
вращатель. Тем самым имитируются изменение дальности до объекта,
изменение мощности, поступающей на приемное устройство изделия,
и доплеровское смещение частоты. Закон управления длиной линии
задержки (зависимости дальности от времени
R
(
t
)
), закон управле-
ния пропусканием аттенюатора (зависимости мощности от времени
P
(
t
)
) и закон управления фазой
ϕ
(
t
)
формируются в математиче-
ских моделях входного сигнала. Математические модели реализованы
в виде программ, написанных на языке С++, с помощью сервисной
программной оболочки Borland C++ Builder 5.00. Сформированные
в программах массивы дальности, мощности и фазы передаются в
программно-аппаратный управляющий модуль, работающий в реаль-
ном масштабе времени, где преобразуются в управляющие параллель-
ные цифровые коды. С помощью драйвера цифрового ввода-вывода
PCI-7200 управляющие коды поступают на УЛЗ, аттенюатор и фа-
зовращатель. При этом драйверу задается тактовая частота выдачи
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 4 49


