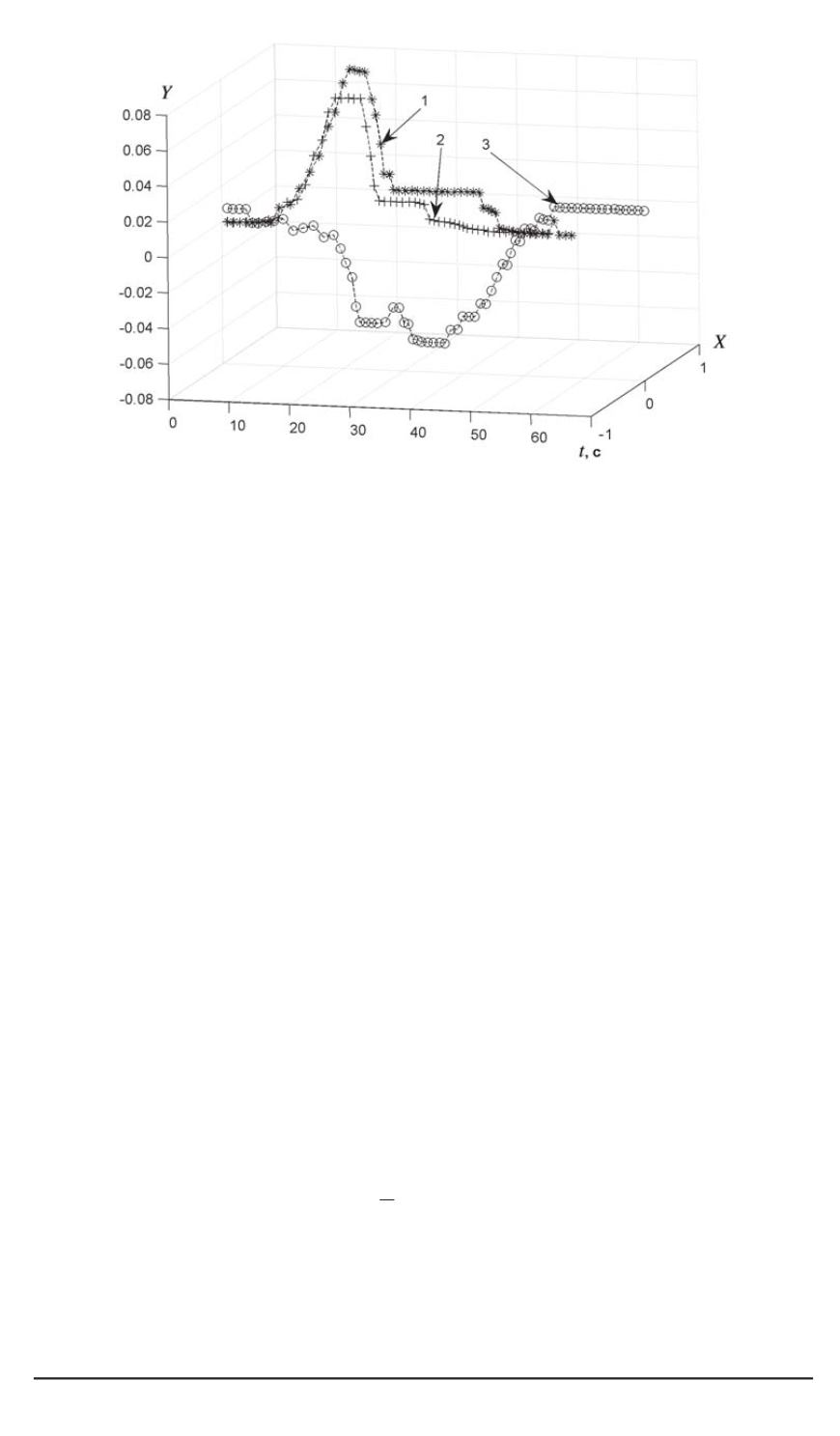
Рис. 1. Пространственно-временные последовательности координат
(
X, Y
)
ма-
нипулятора, соответствующие словам “Да” (
3
) и “Нет” (
1, 2
) на языке глухо-
немых
и вычисление количественной меры близости этихпоследователь-
ностей. Выбор такой меры близости во многом определяет приме-
нимость и эффективность подхода в целом. Опишем особенности
последовательностей, которые необходимо учесть при выборе крите-
рия близости.
Как правило, сигнал на выходе блока сенсоров появляется с опре-
деленной частотой — частотой дискретизации. Выбор этой частоты
относительно произволен, поэтому одинаковые условия окружающей
среды могут быть представлены по-разному при выборе разныхчастот
дискретизации. Если управляемая система способна перемещаться в
окружающей среде (например, мобильный робот), то восприятие од-
ного и того же объекта этой среды при движении с разными скоростя-
ми тоже будет выглядеть по-разному. Чтобы не зависеть от скорости
движения и частоты дискретизации, выбранная функция должна пре-
дусматривать изменения масштаба сравниваемыхсигналов.
При сравнении последовательностей
n
-мерныхвекторов
S
1
и
S
2
одинаковой длины
k
евклидова мера близости этихпоследовательно-
стей определяется следующим образом:
D
(
S
1
, S
2
) =
1
k
1
i k
d
(
S
1
[
i
]
, S
2
[
i
])
,
(1)
где
d
— расстояние между
n
-мерными точками
S
i
[
i
]
и
S
2
[
i
]
:
d
(
S
1
[
i
]
, S
2
[
i
]) = (
1
j n
|
S
1
[
i, j
]
−
S
2
[
i, j
]
|
2
)
1
/
2
.
(2)
106 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 2


