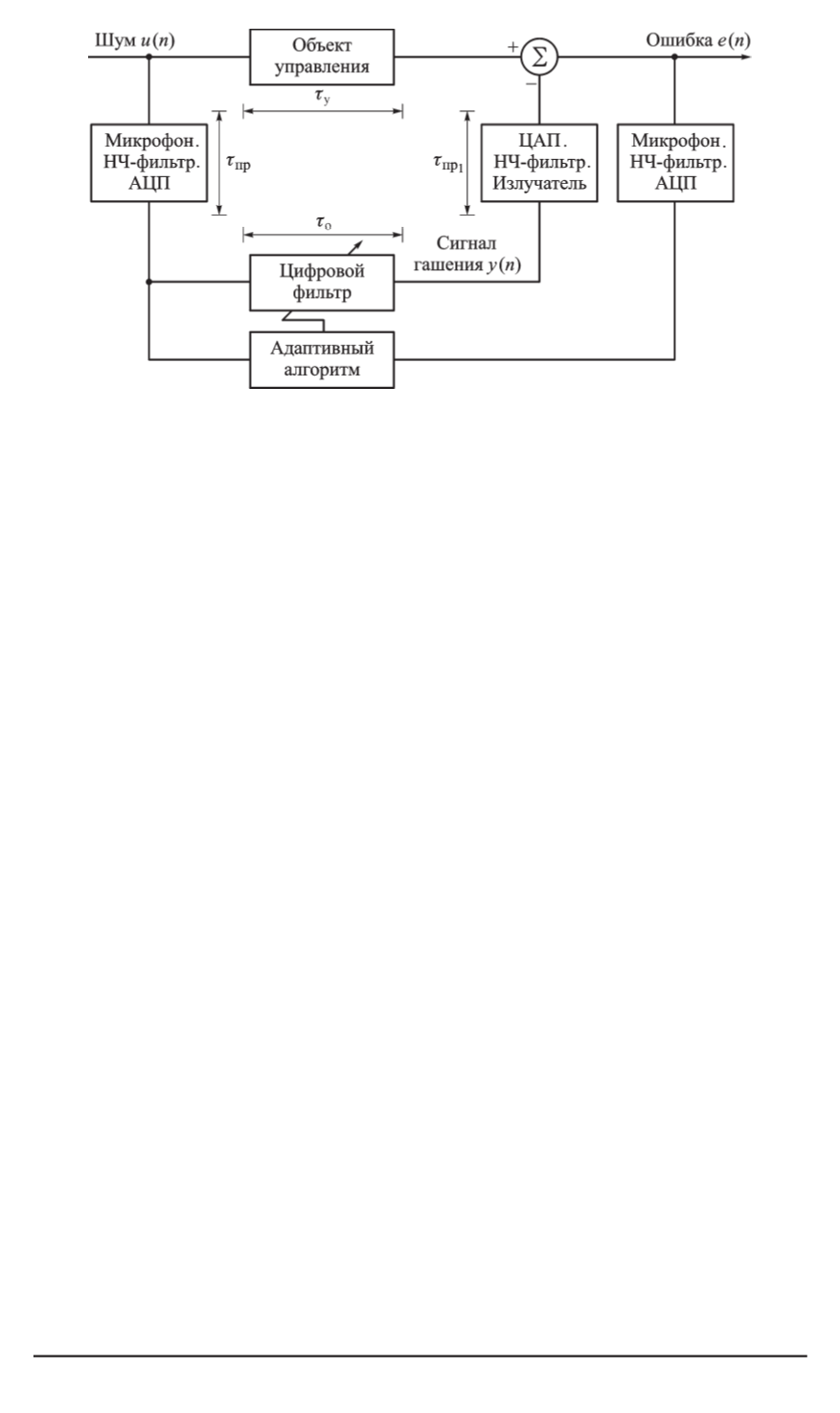
Рис. 6. Распределение задержек сигнала в обобщенной модели САГ
ки сигнала, вносимые блоком управления, определяются производи-
тельностью используемыхсредств цифровой обработки и вычисли-
тельными требованиями алгоритмов. Если производительность аппа-
ратныхвычислительныхсредств напрямую зависит от достигнутого
при ихпроизводстве технологического уровня, то выбор техили иных
алгоритмов является многокритериальной задачей и требует проведе-
ния всестороннего анализа. Используя упрощенные алгоритмы, мож-
но уменьшить задержки, но увеличить время сходимости или снизить
качество гашения.
С помощью созданныхв среде MATLAB моделей оценим вноси-
мые обоими типами преобразователей задержки. Для этого подадим
на ихвходы последовательность прямоугольныхимпульсов с частотой
следования 700 Гц. Результат преобразования можно контролировать
на экране виртуального осциллографа (рис. 7, 8).
Результаты моделирования показывают, что преобразователи па-
раллельного типа имеют существенно меньшее время преобразования
по сравнению с сигма-дельта преобразователями. Если для параллель-
ныхпреобразователей время преобразования не превышает одного
отсчета, то для сигма-дельта преобразователя оно составляет около
100 мкс. Это подтверждается и экспериментально — для сигма-дельта
АЦП при тактовой частоте 32 кГц задержка составляет около 4 отсче-
тов, т.е. 125 мкс. Это значение определяется помимо тактовой частоты
одноразрядного преобразователя, также и порядком НЧ-фильтра в бло-
ке децимации.
Что касается числа эффективныхразрядов, определяемого экспе-
риментально из соотношения сигнал/шум преобразователя, то здесь,
если не принимать во внимание элементы обвязки, на первый план вы-
ходят три составляющие (рис. 9): шумы квантования, интермодуляция
и джиттер.
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 4 95


