Частоту несущей зададим равной 1 ГГц, частоту формирования
ПСП — 10МГц, частоту формирования информационного сигнала —
0,25МГц. В используемой модели учтен доплеровский сдвиг частоты,
который имеет место в реальных системах GPS. Согласно [5], макси-
мальный доплеровский сдвиг на частоте
L
1
может составлять
±
5
кГц
для стационарных приемников сигнала и до
±
10
кГц для приемников,
движущихся с большой скоростью. В данной модели за время моде-
лирования, равное
2
∙
10
−
4
с доплеровский сдвиг частоты изменяется
по линейному закону с 5 до 4 кГц.
Подсистема Channel на рис. 5 используется для моделирования ка-
нала передачи сигнала. В данном канале к исходному сигналу добавля-
ется аддитивный гауссовый белый шум. Блок AWGN (Additive White
Gaussian Noise) Channel, входящий в подсистему Channel, позволяет
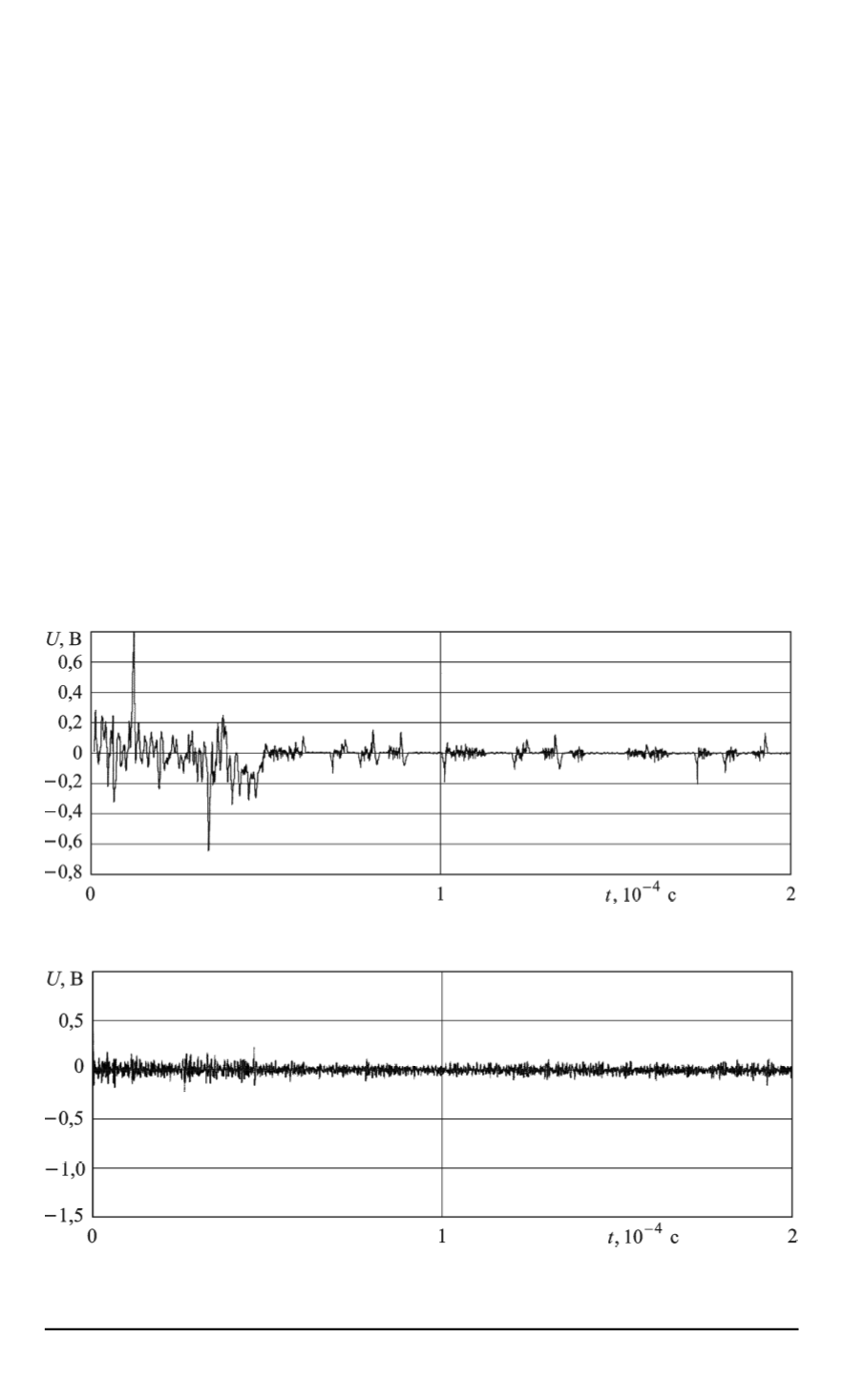
задавать различные значения ОСШ. В настоящей работе моделирова-
ние проводилось для ОСШ 20 дБ, результаты приведены на рис. 6, 7, 8.
Блоки Filter + ADC и Filter + ADC1 одинаковы и предназначены для
фильтрации высокочастотной составляющей сигнала на входе ССЗ.
Данный блок состоит из ФНЧ и простейшего компаратора, на выходе
которого сигнал принимает значения 0 или 1.
Рис. 6. Переходный процесс на выходе ФНЧ в ССЗ при ОСШ 20 дБ
Рис. 7. Переходный процесс на выходе ФНЧ
3
схемы Костаса при ОСШ 20 дБ
48 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 1


